學會了TMflow之後,再來更進階的就是用手臂上的Camera來辨識然後用Gripper來夾東西啦!
這裡有幾個設定要先做:
Gripper的安裝:夾爪的部份可以自行設計,但這裡用的是Robotiq廠牌的夾具,只要設定兩個訊號,夾與放即可,Robotiq在協作型機器人上大多可以安裝,若無法安裝,就得要再接個法蘭。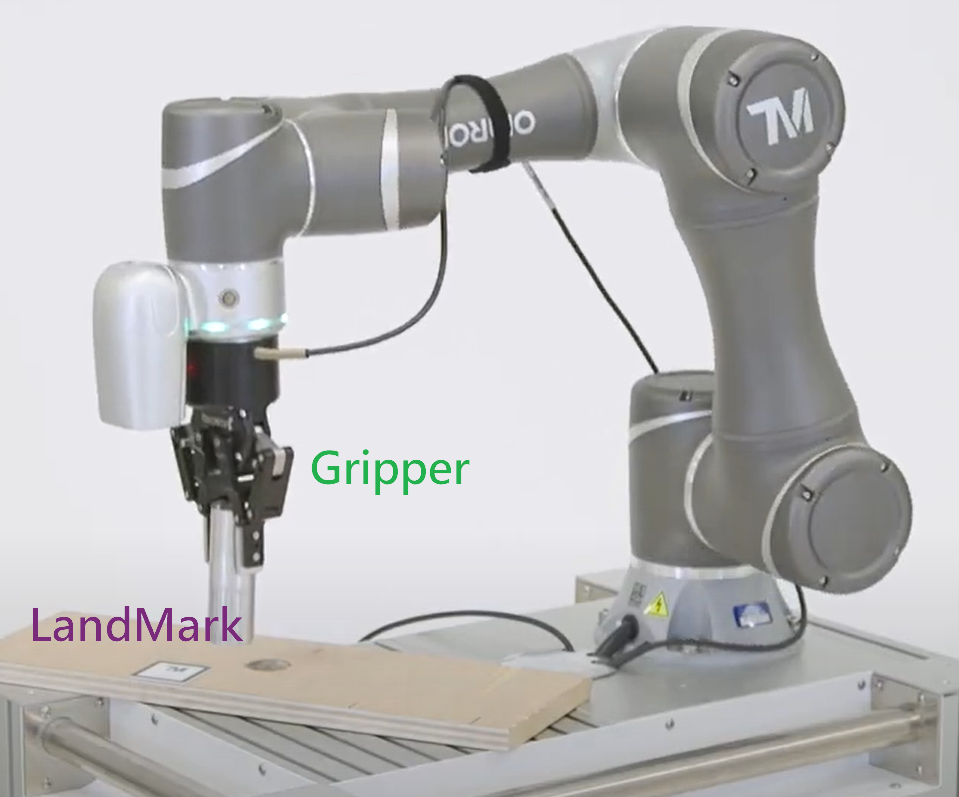
LandMark的設定:若是要用太克人手臂上的Camera, 就要先以LandMark來校正,簡單的來說就是參考點,有了參考點,夾爪就可以到相對應的位置抓取物品,當然設定完辨識的流程後,TMflow的LandMark node就會有個眼睛的圖示點,代表手臂已經認識你的LandMark囉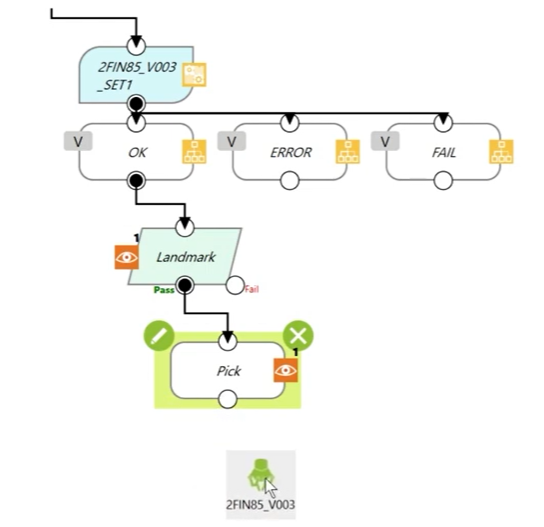
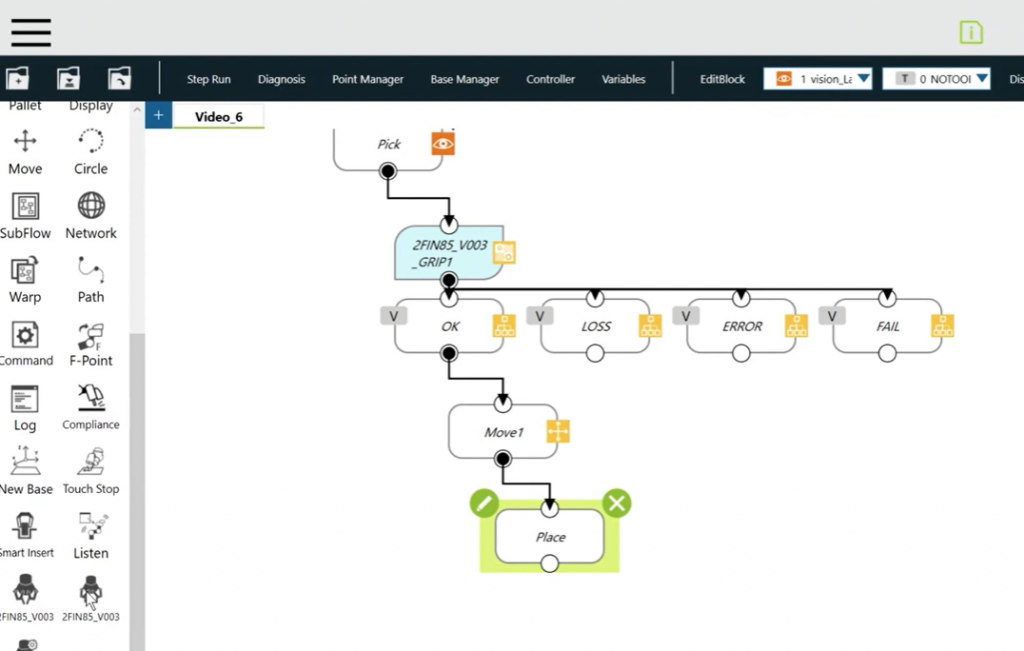
最後,就是把你的LandMark, 手臂點位,就夾點,放置點做成流程,即可完成基本的Pick & Place