在學習隨機森(Random Forest)前先了解一下邏感知器(Perceptron),因為後面複雜的演算法的原理都從它來。
參考網站1參考網站2
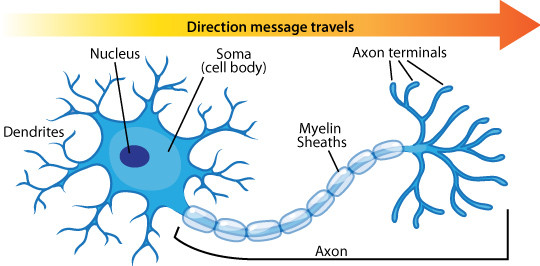
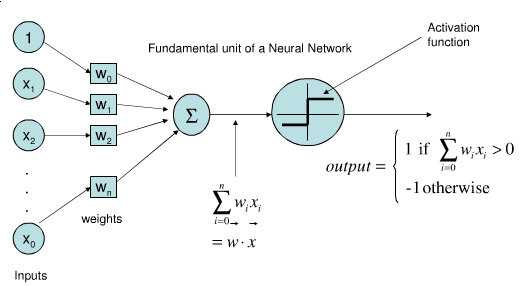
從上圖可了解感知器就是類比神經元的運行方式,有input端結合權重加總後再傳到activation function去決定分成哪一類,但Perceptron在資料是線性可分割的情況下演算才會停止如下左圖。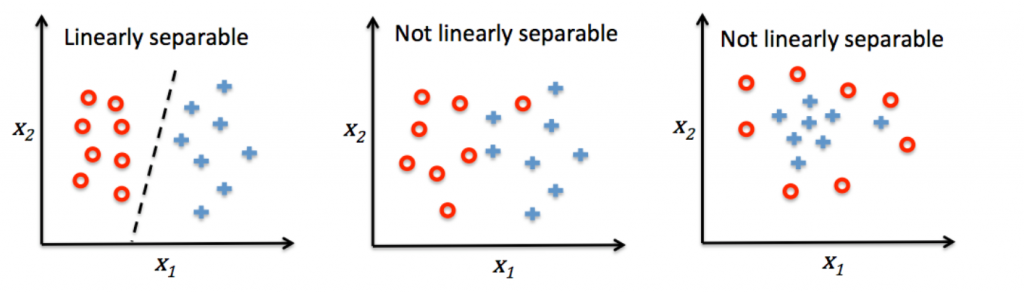
我們假設input有兩個特徵值輸入x1,x2乘以各自權重w1,w2相加後如果大於或小於某個值就會被activation function分成兩類。例如x1w1+x2w2>0 是 +1 ,0< 是 -1,train model就是再找到好的權重w1,w2能將資料做好分類。接下來就用下圖Iris dataset資料集來了解,究竟是怎麼找到的權重與某個定植~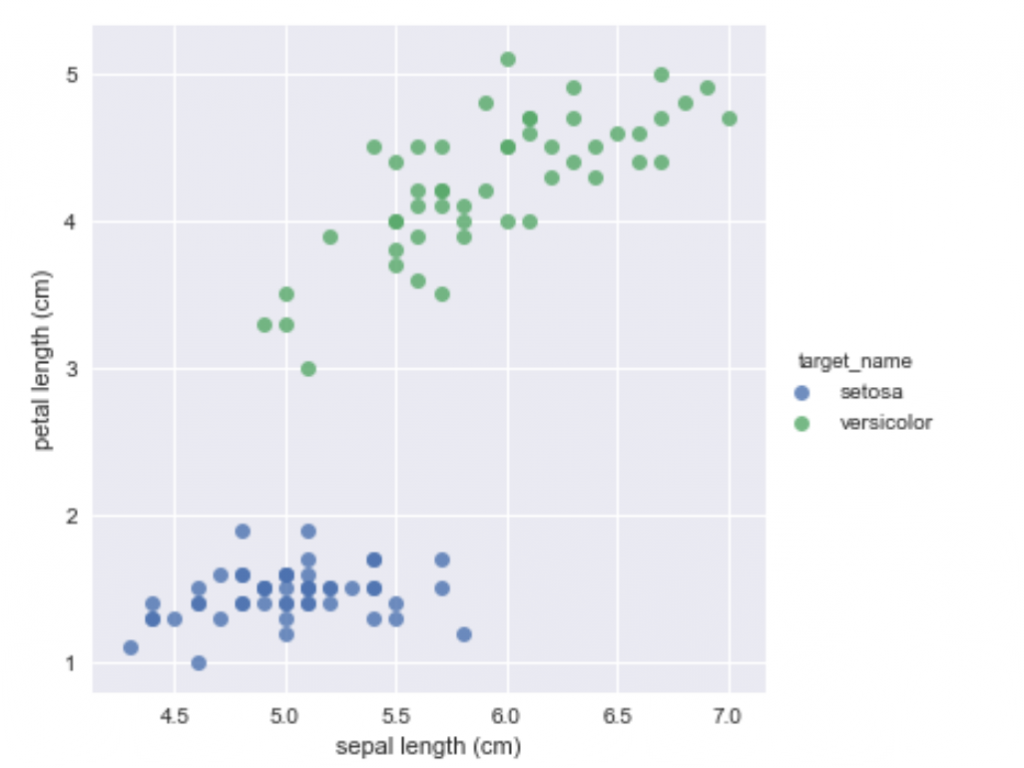
from sklearn import datasets
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
%matplotlib inline
iris = datasets.load_iris()
x = pd.DataFrame(iris['data'], columns=iris['feature_names'])
print("target_names: "+str(iris['target_names']))
y = pd.DataFrame(iris['target'], columns=['target'])
iris_data = pd.concat([x,y], axis=1)
iris_data.head(3)
iris['target_names']
target_name = {
0:'setosa',
1:'versicolor',
2:'virginica'
}
iris_data['target_name'] = iris_data['target'].map(target_name)
iris_data = iris_data[(iris_data['target_name'] == 'setosa')|(iris_data['target_name'] == 'versicolor')]
iris_data = iris_data[['sepal length (cm)','petal length (cm)','target_name']]
iris_data.head(5)
target_class = {
'setosa':1,
'versicolor':-1
}
iris_data['target_class'] = iris_data['target_name'].map(target_class)
del iris_data['target_name']
def sign(z): # 定義激勵函數activation function
if z > 0:
return 1
else:
return -1
w = np.array([0.,0.,0.])
error = 1
iterator = 0
while error != 0:
error = 0
for i in range(len(iris_data)):
x,y = np.concatenate((np.array([1.]), np.array(iris_data.iloc[i])[:2])), np.array(iris_data.iloc[i])[2]
if sign(np.dot(w,x)) != y:
print("iterator: "+str(iterator))
iterator += 1
error += 1
sns.lmplot('sepal length (cm)','petal length (cm)',data=iris_data, fit_reg=False, hue ='target_class')
# 前一個Decision boundary 的法向量
if w[1] != 0:
x_last_decision_boundary = np.linspace(0,w[1])
y_last_decision_boundary = (w[2]/w[1])*x_last_decision_boundary
plt.plot(x_last_decision_boundary, y_last_decision_boundary,'c--')
w += y*x #最重要的一行負責更新權重w
print("x: " + str(x))
print("w: " + str(w))
# x向量
x_vector = np.linspace(0,x[1])
y_vector = (x[2]/x[1])*x_vector
plt.plot(x_vector, y_vector,'b')
# Decision boundary 的方向向量
x_decision_boundary = np.linspace(-0.5,7)
y_decision_boundary = (-w[1]/w[2])*x_decision_boundary - (w[0]/w[2])
plt.plot(x_decision_boundary, y_decision_boundary,'r')
# Decision boundary 的法向量
x_decision_boundary_normal_vector = np.linspace(0,w[1])
y_decision_boundary_normal_vector = (w[2]/w[1])*x_decision_boundary_normal_vector
plt.plot(x_decision_boundary_normal_vector, y_decision_boundary_normal_vector,'g')
plt.xlim(-0.5,7.5)
plt.ylim(5,-3)
plt.show()
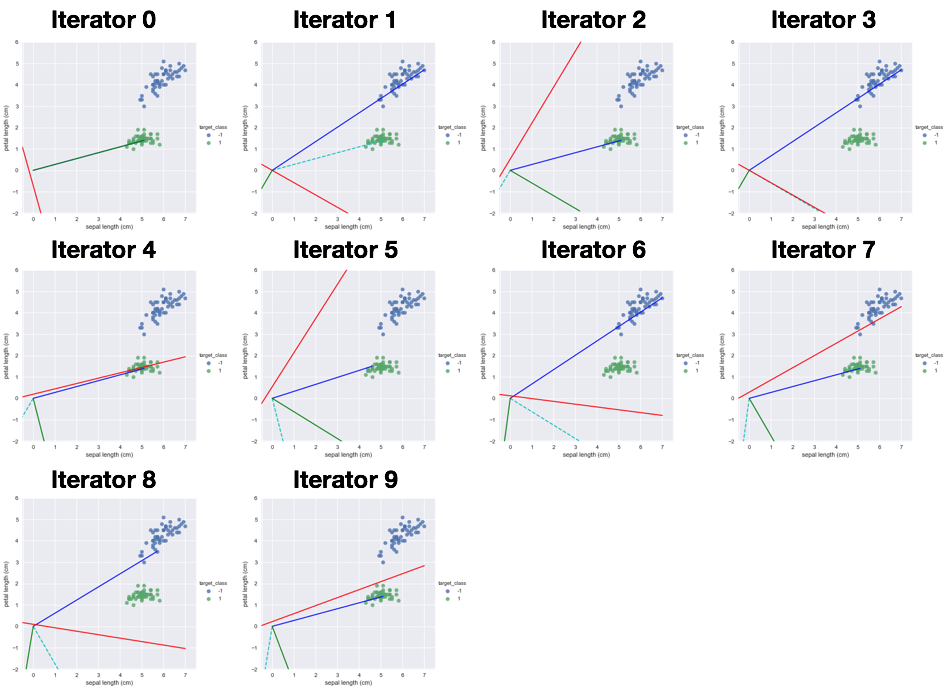
從上流程了解感知器的修正過程,它的原理可以推廣到更複雜的演算法像是深度學習也是。但Perception也是有缺點的如開頭所說要線性可分,而且只知道結果是哪一類AorB,無法知道是A機率多少或B的機率多少。明天要來學習邏輯斯回歸(Logistic regression)可以知道機率是說少~

 iThome鐵人賽
iThome鐵人賽