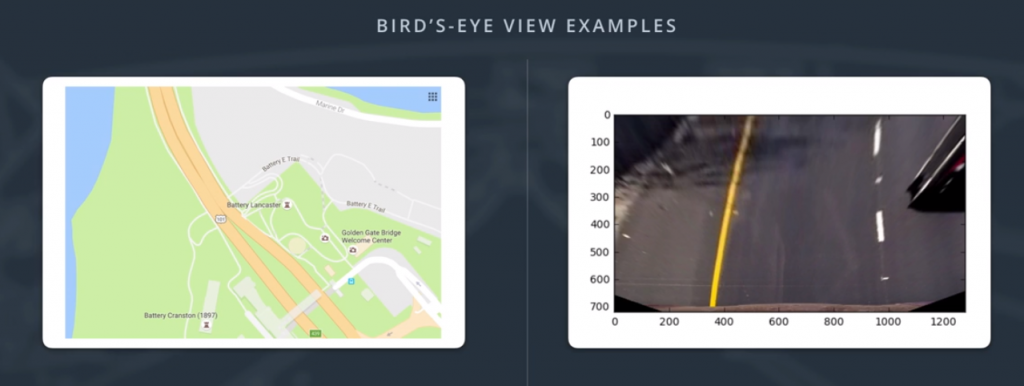
視角轉換使用不同視角將給定圖像中的點映射到不同的期望的圖像點。 其中一種視角轉換是鳥瞰視角轉換,讓我們從上方觀察一條車道; 這對於稍後計算車道曲率非常有用。 除了創建圖像的鳥瞰圖表示之外,視角轉換還可以用於各種不同的視點。
M = cv2.getPerspectiveTransform(src, dst)
Minv = cv2.getPerspectiveTransform(dst, src)
warped = cv2.warpPerspective(img, M, img_size, flags=cv2.INTER_LINEAR)
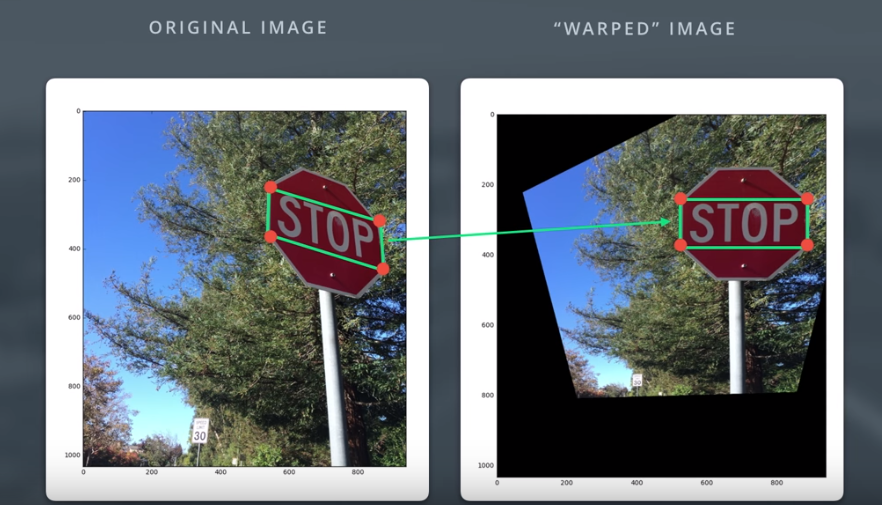
特別注意:應用視角轉換時,手動選擇四個起始點(如下視頻中所做的那樣)通常不是最佳選擇。 還有許多其他方法可以選擇起始點。 例如,許多視角轉換算法將基於邊緣或角點檢測以及分析諸如顏色和周圍像素的屬性以編程方式檢測圖像中的四個起始點。


 iThome鐵人賽
iThome鐵人賽