參考資料:
1. 知乎_Win10安装Ubuntu子系统
2. 深海大章魚_在win10上裝ros
3. 小萌是个球_常用指令
4. 【自造DIARY】_ROS系統安裝教學
 以前對ROS的印象就是要在Linux作業系統下,但現在~如果你跟我一樣是個會乖乖更新且為x64的win10使用者,可以不用重灌成Linux也不用卡個虛擬機!廢話不多說就著手來試試看吧!
以前對ROS的印象就是要在Linux作業系統下,但現在~如果你跟我一樣是個會乖乖更新且為x64的win10使用者,可以不用重灌成Linux也不用卡個虛擬機!廢話不多說就著手來試試看吧!
• ROS安裝於Ubuntu
◎簡要步驟如下:
開啟Win10的Linux子系統
設定>更新和安全>開發者選項_開發人員模式(如圖開啟)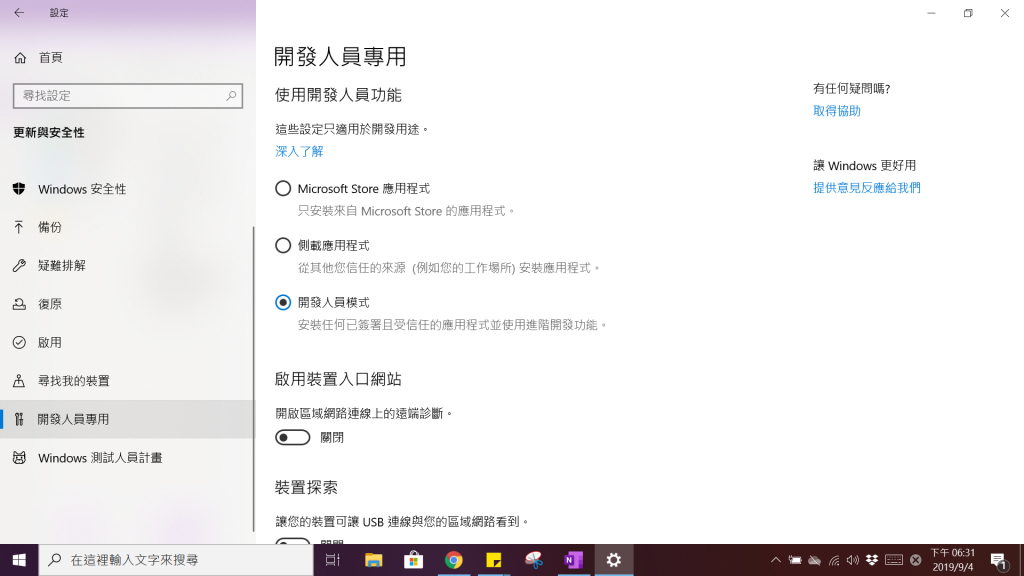
回上頁_應用和功能>相關設置_程序和功能>啟用或關閉Windows功能>(如圖勾選)"適用於Linux的Windows子系統"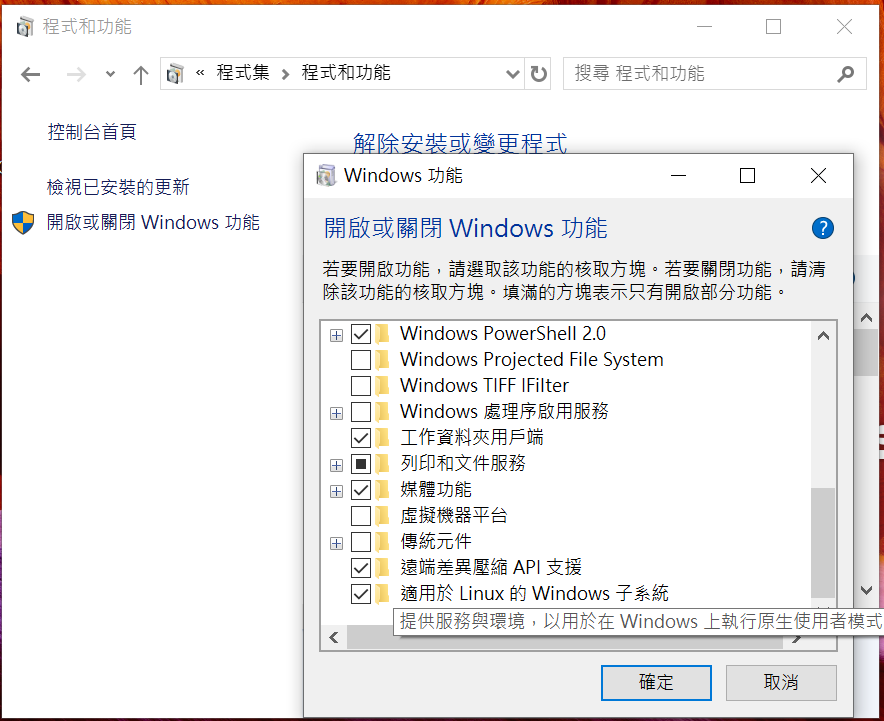
從Microsoft Store下載Ubuntu 16.04 LTS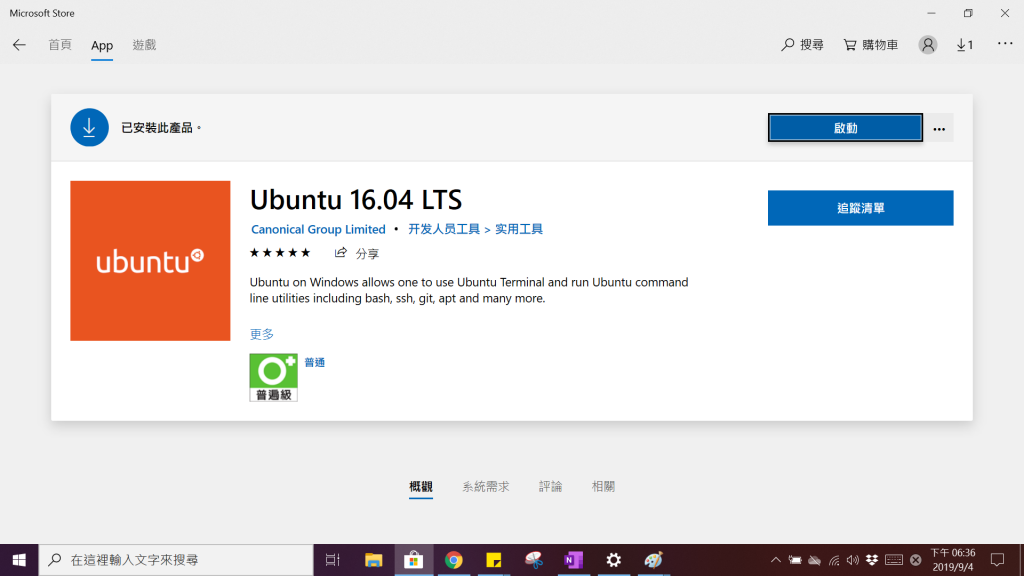
啟動>設定用戶名和密碼
安裝ROS的 Kinetic版 http://wiki.ros.org/kinetic/Installation/Ubuntu
a. 設定 source.listsudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
b. 設定keyssudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
c. 更新套件索引sudo apt-get update
d. 完整安裝sudo apt-get install ros-kinetic-desktop-full
e. 設定系統相依性sudo rosdep initrosdep update
f. 設定ROS執行目錄為預設路徑echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrcsource ~/.bashrc
g. 測試有沒有成功roscore
下載Xming https://sourceforge.net/projects/xming/echo "export DISPLAY=:0" >> ~/.bashrcsource ~/.bashrc
可以試跑小烏龜當作檢查(記得要開啟Xming)
a. 開一個bash,跑ROS核心(就是召喚ROS Master)roscore
b. 再開一個新bash, 跑烏龜的控制器rosrun turtlesim turtle_teleop_key
c. 再開一個新bash, 跑烏龜的顯示器rosrun turtlesim turtlesim_node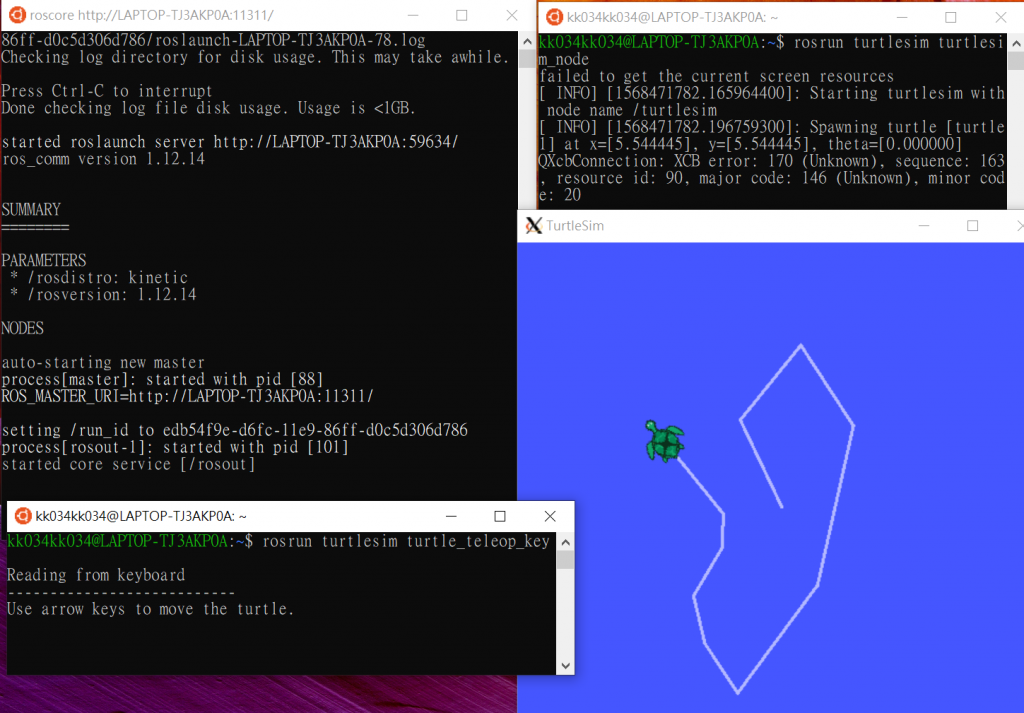
• ROS 常用指令(roscore,roslist,….)
○ 參考資料3
不外乎就是這幾件事:workspace-->Package-->Node-->Topic-->Service,還有導論最後舉例的那些
• 安裝ROS第三方套件供二次開發
○ 參考資料4
◎系統相容跟預設路徑那邊,我都出現Error,若你也發生…就來訂正吧@@
系統不相容之顯示結果及處理方式:
錯誤內容:
ERROR: default sources list file already exists:
etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
處理: sudo rm /etc/ros/rosdep/sources.list.d/20-default.listsudo apt-get updatesudo rosdep initrosdep update
預設路徑錯誤之顯示結果及處理方式:
bash下載 gedit 之後執行$ gedit ~/.bashrc
錯誤內容:
Failed to connect to Mir: Failed to connect to server socket: No such file or directory
Unable to init server: Could not connect: Connection refused
(gedit:6631): Gtk-WARNING **: cannot open display: :0
處理:
原來要先開啟Xming !!!
跑$ gedit ~/.bashrc 就會出現一個視窗
刪除最底下錯誤的還有多餘的/opt/ros/kinetic/setup.bash
save後就~~~gedit ~/.bashrcecho "source /opt/ros/kinetic/setup.bash" >> ~/.bashrcsource ~/.bashrc

