參考資料:
1. MR.POJENLAI ROS系列文整理
2. 去年鐵人賽>ROS自學筆記
3. ROS On JETSON TK1
4. 大頭怪的異想空間

架構:
• ROS filesystem
就是字面上的意思"文件系統",意義就是說ROS的架構是以最小單位的程式碼文件為基礎,去做後續的連結;但因為開發專案時,系統是由數百個package中的數千個node組成,在這種情況下使用ls和cd等命令行工具進行連結可能非常繁瑣,因此藉由Filesystem Tools:roscd,rosls和rospack就可以幫助到。
• ROS package
如果工作空間(workspace)中的任何目錄,包含這兩個文件:一個是package.xml文件,另一個是CmakeList.txt文件,則被視為ROS package。
內容物:
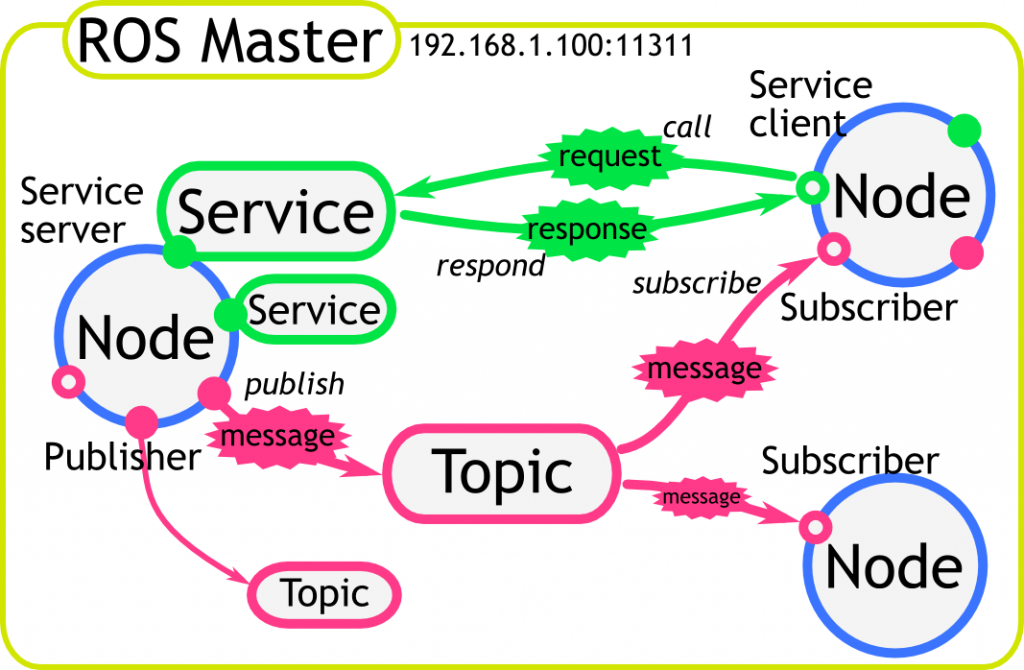
• ROS Node
下一篇實際操作後就會感受到,一個node就是一個程式文件
• ROS Publisher
有的node是身為publisher,會發出訊息到topic
• ROS Subscriber
而有的node則身為subscriber,會從已訂閱的topic接受訊息
• ROS Topics
就像介質、平台般的存在,ex:布告欄
• ROS Message
扮演'語言'的腳色,ex:發表者寫'英文'公布在布告欄
• ROS Service
傳送訊息後,需要靠'等待處理'的這種Service,使得通訊成為'同步',其成分就是request和response
• ROS Action
但有些會等太久而被中斷,這時就需要搭配Topics用的Action
表達:
• ROS Parameters
讓你不用為了改參數而去尋找、修改文件,而是直接有個parameter server用來控管隨時想調整的一些變數
參考:ROS自學筆記Day 26、27
• ROS Graph
上一篇有提到的"可視化工具 rqt",之後實作也會常常打$ rqt_graph來順一下node的連結狀況

