今天的主題是要探討優化器(Optimizer)對模型學習的影響,有關優化器該用哪個好,也是一個蠻令人頭痛的問題,大部分的時候優化器都可以讓你成功收斂,但有小部份時候優化器直接讓你訓練nan。
我們這次要比較的優化器從古早的SGD、Momentum、Adagrad、RMSProp、Adam,到較新的Range都有,要注意因為比較的優化器很多,很有可能會超出 Colab 使用時間上限,為了降低訓練時間,我們會做遷移式學習,鎖住模型142層以前的權重值,只專注訓後面的幾層作為觀察。
另外有關各個優化器的介紹,我在之前有寫過一篇介紹文可以看看。
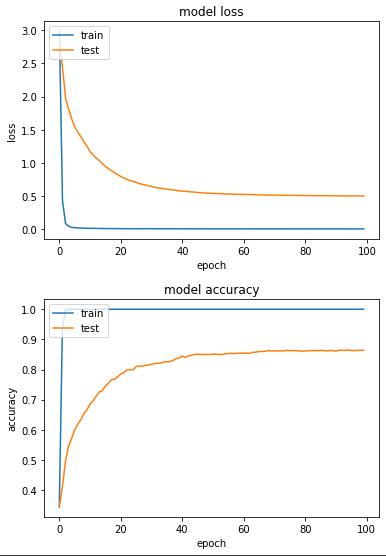
實驗一: SGD
全稱 Stochastic gradient descent,即最基本的 gradient。
base = tf.keras.applications.MobileNetV2(input_shape=(224, 224, 3), include_top=False, weights='imagenet')
net = tf.keras.layers.GlobalAveragePooling2D()(base.output)
net = tf.keras.layers.Dense(NUM_OF_CLASS)(net)
model = tf.keras.Model(inputs=[base.input], outputs=[net])
# Unfreeze weights
for idx, layer in enumerate(model.layers):
layer.trainable = FREEZE_INDEX < idx
model.compile(
optimizer=tf.keras.optimizers.SGD(LR),
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=[tf.keras.metrics.SparseCategoricalAccuracy()],
)
start = timeit.default_timer()
sgd_history = model.fit(
ds_train,
epochs=EPOCHS,
validation_data=ds_test,
verbose=True)
print(f'cost {timeit.default_timer()-start} sec')
產出:
loss: 0.0011 - sparse_categorical_accuracy: 1.0000 - val_loss: 0.4991 - val_sparse_categorical_accuracy: 0.8637
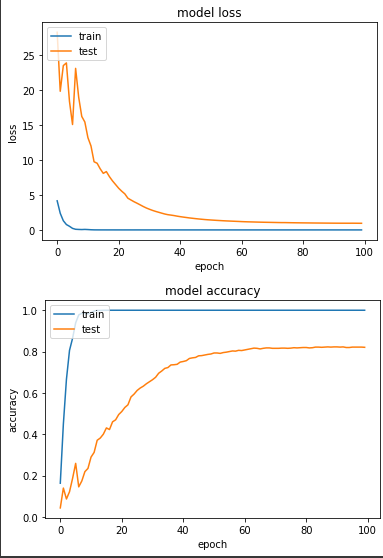
實驗二:Momentum
在SGD中多加了動量的概念。
base = tf.keras.applications.MobileNetV2(input_shape=(224, 224, 3), include_top=False, weights='imagenet')
net = tf.keras.layers.GlobalAveragePooling2D()(base.output)
net = tf.keras.layers.Dense(NUM_OF_CLASS)(net)
model = tf.keras.Model(inputs=[base.input], outputs=[net])
# Unfreeze weights
for idx, layer in enumerate(model.layers):
layer.trainable = FREEZE_INDEX < idx
model.compile(
optimizer=tf.keras.optimizers.SGD(LR, momentum=0.9),
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=[tf.keras.metrics.SparseCategoricalAccuracy()],
)
start = timeit.default_timer()
mom_history = model.fit(
ds_train,
epochs=EPOCHS,
validation_data=ds_test,
verbose=True)
print(f'cost {timeit.default_timer()-start} sec')
產出:
loss: 9.9336e-05 - sparse_categorical_accuracy: 1.0000 - val_loss: 0.9496 - val_sparse_categorical_accuracy: 0.8206
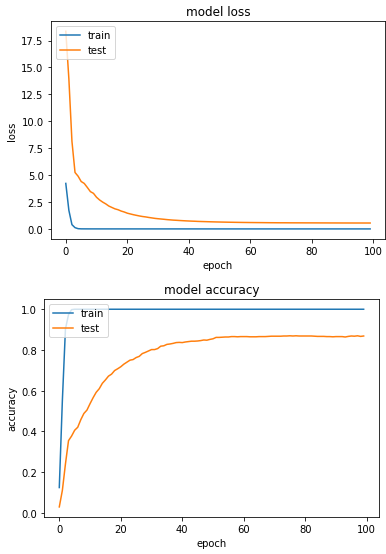
實驗三:Adagrad
在SGD多加了快取的概念
base = tf.keras.applications.MobileNetV2(input_shape=(224, 224, 3), include_top=False, weights='imagenet')
net = tf.keras.layers.GlobalAveragePooling2D()(base.output)
net = tf.keras.layers.Dense(NUM_OF_CLASS)(net)
model = tf.keras.Model(inputs=[base.input], outputs=[net])
# Unfreeze weights
for idx, layer in enumerate(model.layers):
layer.trainable = FREEZE_INDEX < idx
model.compile(
optimizer=tf.keras.optimizers.Adagrad(LR, initial_accumulator_value=0.1),
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=[tf.keras.metrics.SparseCategoricalAccuracy()],
)
start = timeit.default_timer()
ada_history = model.fit(
ds_train,
epochs=EPOCHS,
validation_data=ds_test,
verbose=True)
print(f'cost {timeit.default_timer()-start} sec')
產出:
loss: 2.8722e-04 - sparse_categorical_accuracy: 1.0000 - val_loss: 0.5482 - val_sparse_categorical_accuracy: 0.8686
實驗四:RMSProp
在 Adagrad 中多加了 decay 的概念。這邊由於我自己測試時,發現LR=0.1時,模型非常不穩定,所以此處LR改成0.001。
base = tf.keras.applications.MobileNetV2(input_shape=(224, 224, 3), include_top=False, weights='imagenet')
net = tf.keras.layers.GlobalAveragePooling2D()(base.output)
net = tf.keras.layers.Dense(NUM_OF_CLASS)(net)
model = tf.keras.Model(inputs=[base.input], outputs=[net])
# Unfreeze weights
for idx, layer in enumerate(model.layers):
layer.trainable = FREEZE_INDEX < idx
model.compile(
optimizer=tf.keras.optimizers.RMSprop(0.001, rho=0.99),
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=[tf.keras.metrics.SparseCategoricalAccuracy()],
)
start = timeit.default_timer()
rms_history = model.fit(
ds_train,
epochs=EPOCHS,
validation_data=ds_test,
verbose=True)
print(f'cost {timeit.default_timer()-start} sec')
產出:
loss: 0.0232 - sparse_categorical_accuracy: 0.9951 - val_loss: 2.6411 - val_sparse_categorical_accuracy: 0.7304
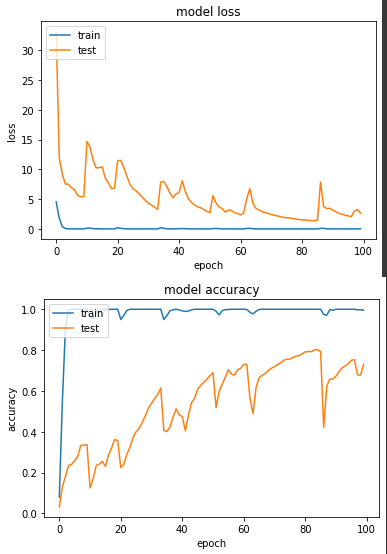
圖表上產生了有鋸齒狀的線,我認為應該是模型仍在多個 local minima 跳躍。
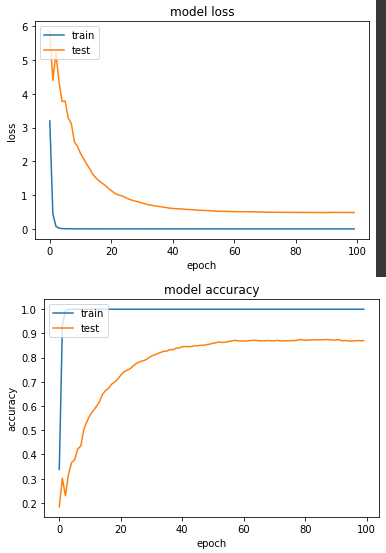
實驗五:Adam
帶入mean和var兩個概念。同樣發現LR=0.1時,模型不穩定,LR改成0.001。
base = tf.keras.applications.MobileNetV2(input_shape=(224, 224, 3), include_top=False, weights='imagenet')
net = tf.keras.layers.GlobalAveragePooling2D()(base.output)
net = tf.keras.layers.Dense(NUM_OF_CLASS)(net)
model = tf.keras.Model(inputs=[base.input], outputs=[net])
# Unfreeze weights
for idx, layer in enumerate(model.layers):
layer.trainable = FREEZE_INDEX < idx
model.compile(
optimizer=tf.keras.optimizers.Adam(0.001, beta_1=0.9, beta_2=0.999),
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=[tf.keras.metrics.SparseCategoricalAccuracy()],
)
start = timeit.default_timer()
adam_history = model.fit(
ds_train,
epochs=EPOCHS,
validation_data=ds_test,
verbose=True)
print(f'cost {timeit.default_timer()-start} sec')
產出:
loss: 7.5301e-05 - sparse_categorical_accuracy: 1.0000 - val_loss: 0.4853 - val_sparse_categorical_accuracy: 0.8706
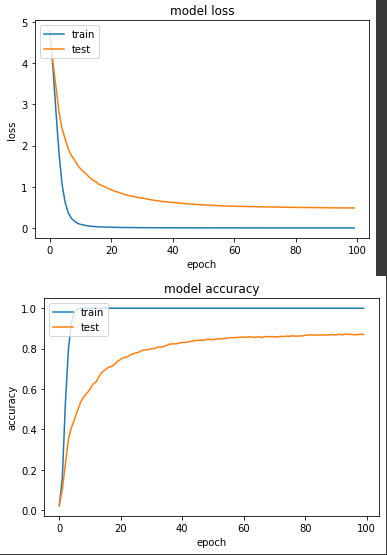
第六個實驗:Ranger
這個比較特別,這是一個結合RAdam和LookAhead(另外兩個新型優化器)的優化器,原作Repo
只是這東西目前要使用的話,用 tensorflow addons 會比較方便。
!pip install -U tensorflow-addons
import tensorflow_addons as tfa
一樣測試後,發現LR=0.001比較正常。
base = tf.keras.applications.MobileNetV2(input_shape=(224, 224, 3), include_top=False, weights='imagenet')
net = tf.keras.layers.GlobalAveragePooling2D()(base.output)
net = tf.keras.layers.Dense(NUM_OF_CLASS)(net)
model = tf.keras.Model(inputs=[base.input], outputs=[net])
# Unfreeze weights
for idx, layer in enumerate(model.layers):
layer.trainable = FREEZE_INDEX < idx
radam = tfa.optimizers.RectifiedAdam(0.001)
ranger = tfa.optimizers.Lookahead(radam, sync_period=6, slow_step_size=0.5)
model.compile(
optimizer=ranger,
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=[tf.keras.metrics.SparseCategoricalAccuracy()],
)
start = timeit.default_timer()
range_history = model.fit(
ds_train,
epochs=100,
validation_data=ds_test,
verbose=True)
print(f'cost {timeit.default_timer()-start} sec')
產出:
loss: 4.8191e-04 - sparse_categorical_accuracy: 1.0000 - val_loss: 0.4846 - val_sparse_categorical_accuracy: 0.8696
以上就是我們針對六種不同的優化器訓練同一個模型的實驗,以我自己實務經驗,我其實也是個跟風仔,會先嘗試使用比較新型的優化器,但如果訓練過程中發生 loss 不斷增大的狀況,我會再切成 SGD 來 debug 模型或調整 learning rate 來檢查有沒有問題。

