學了半個月終於要端出「爆漿瀨尿蝦牛丸」了嗎?要開始讓大家體會一下牛肉(MCU)的鮮、瀨尿蝦(AI)的甜,及摻在一起比老鼠斑有過之而無不及的味道了嗎?各位施主,這又是一個介於是和不是的問題了,只有耐心看完才能感受這其中的酸甜苦辣。先說結論,這個章節確實要幫大家介紹如何整合TensorFlow Lite Microcontroller(以下簡稱TFLM)加Arduino IDE加Arduino Nano 33 BLE Sense開發板(以下簡稱BLE Sense)及板上微機電麥克風MP34DT05-A來運行一個智能音箱常見的基本語音命令辨識及控制的micro_speech範例。但看完這個章節猜想你有極大可能會想要直接棄番不再追下去。不過請不要衝動,不經一番寒徹骨焉得梅花撲鼻香,後面章節還有更好的解決方案,今天就當先學個概念,後面就會操作的更得心應手了。
在[Day 11] 讓tinyML聽見你的呼喚已初步介紹過如何透過BLE Sense收集到板子上的微機電麥克風MP34DT05-A所接收到的聲音訊號。在[Day 12]和[Day 13]「tinyML開發框架(一):TensorFlow Lite Micro初體驗」中,已分別幫大家介紹如何在TFLM上建立、訓練、優化模型、準備好MCU所需格式模型參數檔案,及如何使用Arduino IDE和BLE Sense將備妥的模型完整運行並推論起來。沒看過前面章節的朋友,麻煩先補一下課並把Arduino IDE工作環境建好,以免後面看的一頭霧水。接下來我們就順著TFLM官網介紹的微語音(micro_speech)範例來說明如何把這兩樣素材結合在一起,完成一個類似智能音箱的語言命令的動作,說「YES」及「NO」來控制綠色和紅色LED點亮的功能。(如圖Fig. 16-1所示)
Fig. 16-1 TensorFlow Lite Microcontroller提供之micro_speech聲音辨識範例運行結果。(圖片來源)
要運行的這個範例不難,假設你已照著[Day 13] tinyML開發框架(一):TensorFlow Lite Micro初體驗(下) 圖13-2把Arduino_TensorFlowLite函式庫安裝好了,此時只要新增一個micro_speech範例(如下程式所示),經過編譯、上傳,接著開啟序列埠監控視窗,對著BLE Sense板子說出「YES」或「NO」,就能看到對應的綠色、紅色LED點亮,同時也會於監控視窗上看到對應字串。如果無法順利辨識就把板子靠近嘴巴一點,或者多說幾次來改善辨識結果。
/*
Arduino_TensorFlowLite micro_speech.ino 範例程式
在Arduino IDE安裝好Arduino_TensorFlowLite函式庫後,
點擊主選單[檔案]-[範例]-[Arduino_TensorFlowLite]-[micro_speech]產生。
*/
// 導入相關函式庫頭文件
#include <TensorFlowLite.h> // 導入TensorFlowLite函式庫頭文件
#include "main_functions.h"
#include "audio_provider.h"
#include "command_responder.h"
#include "feature_provider.h"
#include "micro_features_micro_model_settings.h"
#include "micro_features_model.h"
#include "recognize_commands.h"
#include "tensorflow/lite/micro/micro_error_reporter.h"
#include "tensorflow/lite/micro/micro_interpreter.h"
#include "tensorflow/lite/micro/micro_mutable_op_resolver.h"
#include "tensorflow/lite/schema/schema_generated.h"
#include "tensorflow/lite/version.h"
// 宣告全域變數及命名空間,初始化相關指標及變數,方便後面其它子程式引用
namespace {
tflite::ErrorReporter* error_reporter = nullptr;
const tflite::Model* model = nullptr;
tflite::MicroInterpreter* interpreter = nullptr;
TfLiteTensor* model_input = nullptr;
FeatureProvider* feature_provider = nullptr;
RecognizeCommands* recognizer = nullptr;
int32_t previous_time = 0;
// 配置記憶體空間,包含聲音輸入、模型參數等
constexpr int kTensorArenaSize = 10 * 1024;
uint8_t tensor_arena[kTensorArenaSize];
int8_t feature_buffer[kFeatureElementCount];
int8_t* model_input_buffer = nullptr;
}
// 設定腳位用途及模組初始化(只在電源啟動或重置時執行一次)
void setup() {
// 建立除錯日誌
static tflite::MicroErrorReporter micro_error_reporter;
error_reporter = µ_error_reporter;
// 載入模型
model = tflite::GetModel(g_model);
if (model->version() != TFLITE_SCHEMA_VERSION) {
TF_LITE_REPORT_ERROR(error_reporter,
"Model provided is schema version %d not equal "
"to supported version %d.",
model->version(), TFLITE_SCHEMA_VERSION);
return;
}
// 不使用全操作解析器,改使用微操作解析器只加入模型有用到的元素
// 目前只加入DepthwiseConv2D, FullyConnected, Softmax, Reshape
// tflite::AllOpsResolver resolver;
// NOLINTNEXTLINE(runtime-global-variables)
static tflite::MicroMutableOpResolver<4> micro_op_resolver(error_reporter);
if (micro_op_resolver.AddDepthwiseConv2D() != kTfLiteOk) {
return;
}
if (micro_op_resolver.AddFullyConnected() != kTfLiteOk) {
return;
}
if (micro_op_resolver.AddSoftmax() != kTfLiteOk) {
return;
}
if (micro_op_resolver.AddReshape() != kTfLiteOk) {
return;
}
// 建立直譯器以執行模型相關動作
static tflite::MicroInterpreter static_interpreter(
model, micro_op_resolver, tensor_arena, kTensorArenaSize, error_reporter);
interpreter = &static_interpreter;
// 配置張量所需記憶體
TfLiteStatus allocate_status = interpreter->AllocateTensors();
if (allocate_status != kTfLiteOk) {
TF_LITE_REPORT_ERROR(error_reporter, "AllocateTensors() failed");
return;
}
// 建立輸出入
model_input = interpreter->input(0);
if ((model_input->dims->size != 2) || (model_input->dims->data[0] != 1) ||
(model_input->dims->data[1] !=
(kFeatureSliceCount * kFeatureSliceSize)) ||
(model_input->type != kTfLiteInt8)) {
TF_LITE_REPORT_ERROR(error_reporter,
"Bad input tensor parameters in model");
return;
}
model_input_buffer = model_input->data.int8; // 宣告輸入緩衝區為INT8資料型態
// 建立特徵提供器及相關參數
// NOLINTNEXTLINE(runtime-global-variables)
static FeatureProvider static_feature_provider(kFeatureElementCount,
feature_buffer);
feature_provider = &static_feature_provider;
static RecognizeCommands static_recognizer(error_reporter);
recognizer = &static_recognizer;
previous_time = 0; // 清除前次計時
}
// 設定無窮循環程式 (會一直依序重覆執行)
void loop() {
// 擷取目前時間的聲音圖譜
const int32_t current_time = LatestAudioTimestamp();
int how_many_new_slices = 0;
TfLiteStatus feature_status = feature_provider->PopulateFeatureData(
error_reporter, previous_time, current_time, &how_many_new_slices);
if (feature_status != kTfLiteOk) {
TF_LITE_REPORT_ERROR(error_reporter, "Feature generation failed");
return;
}
previous_time = current_time;
// 假設沒有取得任何聲音就結束此次動作
if (how_many_new_slices == 0) {
return;
}
// 複製聲音資料到模型輸入端點
for (int i = 0; i < kFeatureElementCount; i++) {
model_input_buffer[i] = feature_buffer[i];
}
// 運行推理
TfLiteStatus invoke_status = interpreter->Invoke();
if (invoke_status != kTfLiteOk) {
TF_LITE_REPORT_ERROR(error_reporter, "Invoke failed");
return;
}
// 取得輸出值的指標
TfLiteTensor* output = interpreter->output(0);
// 經由辨識結果決定輸出命令字串及LED亮燈變化
const char* found_command = nullptr;
uint8_t score = 0;
bool is_new_command = false;
TfLiteStatus process_status = recognizer->ProcessLatestResults(
output, current_time, &found_command, &score, &is_new_command);
if (process_status != kTfLiteOk) {
TF_LITE_REPORT_ERROR(error_reporter,
"RecognizeCommands::ProcessLatestResults() failed");
return;
}
// 透過序列埠回報到電腦,包含目前時間、辨識命令結果、置信分數及是否為新命令等
RespondToCommand(error_reporter, current_time, found_command, score,
is_new_command);
}
但是…,事情真的有這麼簡單和順利嗎?為什麼板子老是聽錯或聽不懂「YES」、「NO」?我要怎麼才能把「YES」、「NO」改成中文的「開」、「關」或「紅」、「綠」甚至是「電燈亮」「電燈滅」這樣的短詞呢?我不只要改變LED顏色,可以不可改成推動電氣設備開關呢?這可能就要從頭說起了,包括下列幾大步驟。
不想深入了解的朋友,想讓生活多點樂趣的朋友,可以先跳過下面的部份,等後面章節再來學習相同的功能但更輕鬆的作法。
從圖Fig. 16-2就可看出,這個範例不是一個ino檔(主程式)就能運作的,還要有另外的22個檔案才能將這個範例完整執行起來,雖然每個程式的份量不是很多,但若想深人了解的朋友可能也要花上不少時間。不過我猜想大家不一定想全盤了解,而只是關心訓練好的模型怎麼放進MCU及如何控制實體家電而不只是板子上的LED。所以這裡僅先點出除了主程式外另二個重點程式,arduino_command_responder.cpp及micro_features_model.cpp。其它的就留給大家自行研究了。
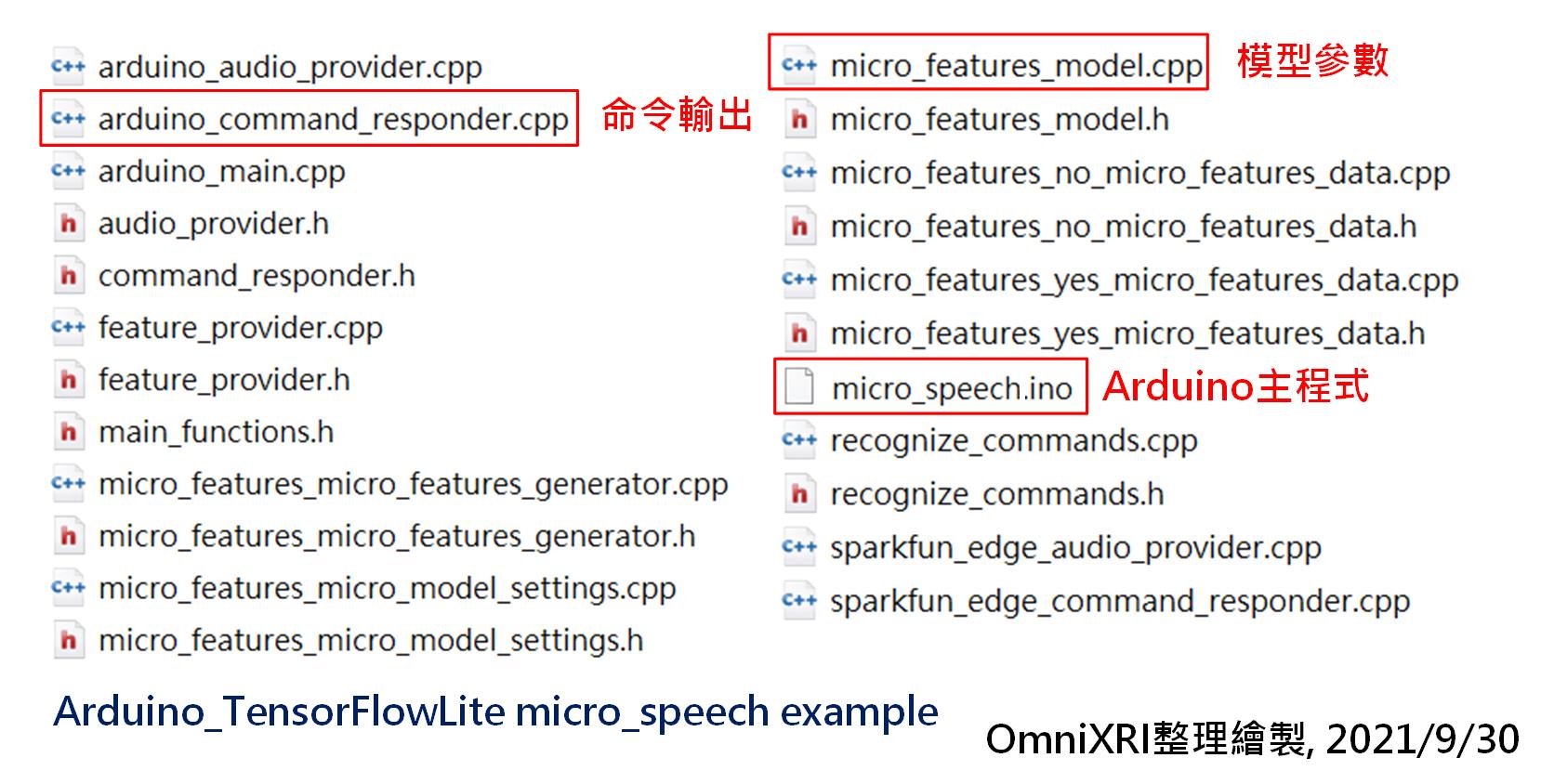
Fig. 16-2 Arduino TensorFlowLite micro_speech範例程式組成。(OmniXRI整理製作, 2021/9/30)
首先介紹arduino_command_responder.cpp,這段程式負責回應語音辨識的結果,即輸出結果字串和控制LED點滅。在BLE Sense板子上有一個橘色LED(LED_BUILDIN)和一個RGB三色LED(LEDR, LEDG, LEDB)。但其點亮方式剛好相反,前者是給HIGH點亮,而後者則是給LOW點亮,控制時要特別注意。目前模型推論後共會產生四種結果及燈號。
/*
arduino_command_responder.cpp
語音(命令)辨識結果輸出回應(控制)程式
將辨識結果字串從序列埠傳回電腦。
若沒有聲音則會反轉橘色LED(LED_BUILDIN),若非「YES」「NO」則亮藍色LED(LEDB),
若有偵測到「YES」「NO」則點亮對應的綠色(LEDG)和紅色LED(LEDR)。
*/
#include "Arduino.h"
void RespondToCommand(tflite::ErrorReporter* error_reporter,
int32_t current_time, const char* found_command,
uint8_t score, bool is_new_command) {
static bool is_initialized = false; // 是否已初始化旗標
// 若尚未初始化
if (!is_initialized) {
// 設定四個LED腳位為輸出
pinMode(LED_BUILTIN, OUTPUT);
pinMode(LEDR, OUTPUT);
pinMode(LEDG, OUTPUT);
pinMode(LEDB, OUTPUT);
// 使其初始皆為不亮狀態
digitalWrite(LEDR, HIGH);
digitalWrite(LEDG, HIGH);
digitalWrite(LEDB, HIGH);
// 設初始化旗標為真
is_initialized = true;
}
static int32_t last_command_time = 0; // 最後一次命令時間
static int count = 0; // 計數器
static int certainty = 220; // 確定值
// 若為新命令
if (is_new_command) {
// 輸出結果字串到序列埠,包含命令結果、置信分數和目前時間。
TF_LITE_REPORT_ERROR(error_reporter, "Heard %s (%d) @%dms", found_command,
score, current_time);
// 若為Yes命令則點亮綠色LED
if (found_command[0] == 'y') {
last_command_time = current_time; // 記錄最後時間
digitalWrite(LEDG, LOW); // 點亮綠色LED
}
// 若為No命令則點亮紅色LED
if (found_command[0] == 'n') {
last_command_time = current_time; // 記錄最後時間
digitalWrite(LEDR, LOW); // 點亮紅色LED
}
// 若為不明(unknow)命令則點亮藍色LED
if (found_command[0] == 'u') {
last_command_time = current_time; // 記錄最後時間
digitalWrite(LEDB, LOW); // 點亮藍色LED
}
}
// 若最後時間不為零且超過3秒,則熄滅所有LED
if (last_command_time != 0) {
if (last_command_time < (current_time - 3000)) {
last_command_time = 0;
digitalWrite(LED_BUILTIN, LOW);
digitalWrite(LEDR, HIGH);
digitalWrite(LEDG, HIGH);
digitalWrite(LEDB, HIGH);
}
// 若時間未超過3秒則返回
return;
}
// 若為沒有聲音(或背景音)則計數器加1,橘色LED反轉。
++count; // 計數器加1
if (count & 1) {
digitalWrite(LED_BUILTIN, HIGH); // 點亮橘色LED
} else {
digitalWrite(LED_BUILTIN, LOW); // 熄滅橘色LED
}
}
解釋完如何將辨識結果和LED輸出結果的關連後,相信大家很容易就可聯想到,只要使用板子上其它通用輸出入接點(GPIO)連接到繼電器,再接上一般110V的家電(只有開和關的那種),就可以控制其電源開啟和關閉了。
在這裡補充一個使用狀況,由於板上的麥克風還滿靈敏的,所以當環境中有像電風扇或背景雜音較大的情況下,會發現藍色LED一直亮著,表示有一直有收到一段聲音,但聽不懂是「YES」或「NO」,此時建議到比較安靜的環境再測試,效果會好些。
另外關於容易聽錯、想換其它語音控制命令,這和資料集產生方式及模型結構、訓練、調參、轉換、優化很有關聯,當然完成後如何佈署更是我們關心的重點,這些就留待下回分解。
參考連結
TensorFlow Lite Microcontroller - Micro Speech 微語音辨識


{kind=link}