ROS中有個特別的package叫做pluginlib,這個package提供了一個plugin的架構,讓我們可以在不修改原始碼的情況下,動態的載入plugin,類似於C++的多型(polymorphism)。這樣可以讓程式更有彈性,也更容易擴充。
舉例來說,在自駕車中避障的功能可能同時有不同的演算法,我們會需要在不同的情境下啟用不同的避障功能,像是白天就可以使用LiDAR+相機的plugin,但夜間可能相機感光度不夠只能依賴LiDAR的plugin。
這邊拿官方的多邊形為例子來說明plugin的使用方法。首先我們會先定義一個多邊形的base class,接著會有三角形和長方形的plugin連結到base class。
這邊借用官方的流程圖: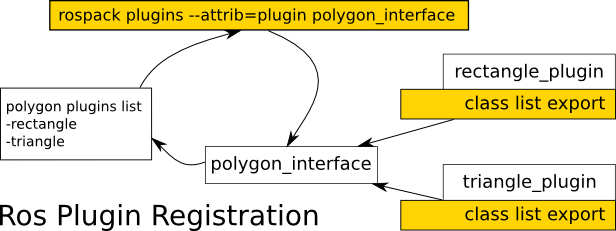
安裝pluginlib package
sudo apt-get install ros-foxy-pluginlib
建立一個polygon_base package
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake polygon_base --dependencies pluginlib --node-name area_node
在ros2_ws/src/polygon_base/include/polygon_base/regular_polygon.hpp中定義一個多邊形的base class
#ifndef POLYGON_BASE_REGULAR_POLYGON_HPP
#define POLYGON_BASE_REGULAR_POLYGON_HPP
namespace polygon_base
{
class RegularPolygon
{
public:
virtual void initialize(double side_length) = 0;
virtual double area() = 0;
virtual ~RegularPolygon(){}
protected:
RegularPolygon(){}
};
} // namespace polygon_base
#endif // POLYGON_BASE_REGULAR_POLYGON_HPP
這些基本上都是C++的pure virtual function,沒有辦法單獨運作,需要被繼承才能使用。
接著編輯CMakeLists.txt讓這個header可以被其他Package的Class繼承:
install(
DIRECTORY include/
DESTINATION include
)
...
ament_export_include_directories(
include
)
# before ament_package
創建polygon_plugins的package
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake polygon_plugins --dependencies polygon_base pluginlib --library-name polygon_plugins
編輯ros2_ws/src/polygon_plugins/src/polygon_plugins.cpp:
#include <polygon_base/regular_polygon.hpp>
#include <cmath>
namespace polygon_plugins
{
class Square : public polygon_base::RegularPolygon
{
public:
void initialize(double side_length) override
{
side_length_ = side_length;
}
double area() override
{
return side_length_ * side_length_;
}
protected:
double side_length_;
};
class Triangle : public polygon_base::RegularPolygon
{
public:
void initialize(double side_length) override
{
side_length_ = side_length;
}
double area() override
{
return 0.5 * side_length_ * getHeight();
}
double getHeight()
{
return sqrt((side_length_ * side_length_) - ((side_length_ / 2) * (side_length_ / 2)));
}
protected:
double side_length_;
};
}
#include <pluginlib/class_list_macros.hpp>
PLUGINLIB_EXPORT_CLASS(polygon_plugins::Square, polygon_base::RegularPolygon)
PLUGINLIB_EXPORT_CLASS(polygon_plugins::Triangle, polygon_base::RegularPolygon)
這邊我們定義了兩個plugin,一個是正方形,一個是三角形,裡面定義了上面pure virtual function的實作。
Classes後面接著才是重點,這邊我們使用了pluginlib提供的PLUGINLIB_EXPORT_CLASS,這個macro會幫將這些classes註冊到plugin中。第一個參數是class的名稱,第二個參數是base class的名稱。
Plugin loader還會需要一個plugin.xml來表達資訊。創建一個ros2_ws/src/polygon_plugins/plugins.xml:
<library path="polygon_plugins">
<class type="polygon_plugins::Square" base_class_type="polygon_base::RegularPolygon">
<description>This is a square plugin.</description>
</class>
<class type="polygon_plugins::Triangle" base_class_type="polygon_base::RegularPolygon">
<description>This is a triangle plugin.</description>
</class>
</library>
library的path是指定plugin的library。與ROS不同的是ROS會需要lib/的prefix,這邊的話會變成lib/polygon_plugins。但這點在ROS2中已經被修改,不需要加上lib/。type是plugin的名稱。base_class_type是指定base class的名稱。description是plugin的描述。在ROS中註冊plugin是寫在package.xml而ROS2則是寫在CMakeLists.txt,不過也變的冗長許多從三行變成好幾行。編輯CMakeLists.txt,將下面的程式碼加到ros2_ws/src/polygon_plugins/CMakeLists.txt的find_package(pluginlib REQUIRED)下面:
add_library(polygon_plugins src/polygon_plugins.cpp)
target_include_directories(polygon_plugins PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
ament_target_dependencies(
polygon_plugins
polygon_base
pluginlib
)
pluginlib_export_plugin_description_file(polygon_base plugins.xml)
install(
TARGETS polygon_plugins
EXPORT export_${PROJECT_NAME}
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
pluginlib_export_plugin_description_file的第一個參數是指定base class的package,第二個參數是指定plugin.xml的路徑。
最後在ament_package前面加上:
ament_export_libraries(
polygon_plugins
)
ament_export_targets(
export_${PROJECT_NAME}
)
這樣就大功告成寫好了plugin,接著我們要來寫一個node來使用這些plugin。
理論上這些plugin可以在任何一個package中使用,這邊我們寫在base package裡。
ros2_ws/src/polygon_base/src/area_node.cpp:
#include <pluginlib/class_loader.hpp>
#include <polygon_base/regular_polygon.hpp>
int main(int argc, char** argv)
{
// To avoid unused parameter warnings
(void) argc;
(void) argv;
pluginlib::ClassLoader<polygon_base::RegularPolygon> poly_loader("polygon_base", "polygon_base::RegularPolygon");
try
{
std::shared_ptr<polygon_base::RegularPolygon> triangle = poly_loader.createSharedInstance("polygon_plugins::Triangle");
triangle->initialize(10.0);
std::shared_ptr<polygon_base::RegularPolygon> square = poly_loader.createSharedInstance("polygon_plugins::Square");
square->initialize(10.0);
printf("Triangle area: %.2f\n", triangle->area());
printf("Square area: %.2f\n", square->area());
}
catch(pluginlib::PluginlibException& ex)
{
printf("The plugin failed to load for some reason. Error: %s\n", ex.what());
}
return 0;
}
ClassLoader是pluginlib提供的class,可以用來載入plugin。:warning: 注意這邊
ploygon_base並沒有指出polygon_plugins的dependency而是直接使用,所以在使用時須自行確認是否有安裝polygon_plugins。
colcon build --packages-select polygon_base polygon_plugins
source install/setup.bash
ros2 run polygon_base area_node
Triangle area: 43.30
Square area: 100.00
area_node.cpp中並沒有直接使用到polygon_plugins,但是在執行時卻會載入polygon_plugins的plugin。由於plugin不是ROS的原生的功能而是以package的形式,所以改變的幅度並沒有很大,只是在註冊plugin的部分有些許差異。
| 說明 | ROS | ROS2 |
|---|---|---|
| plugin.xml的library | lib/ | 不需要lib/ |
| 註冊plugin檔案 | package.xml | CMakeLists.txt |

