上面一篇介紹示教器,現在我們就用示教器來移動手臂!
簡單的說,就是按哪個箭頭就往哪去!不用擔心, 示教器為Touch Panel!觸控非常靈敏。
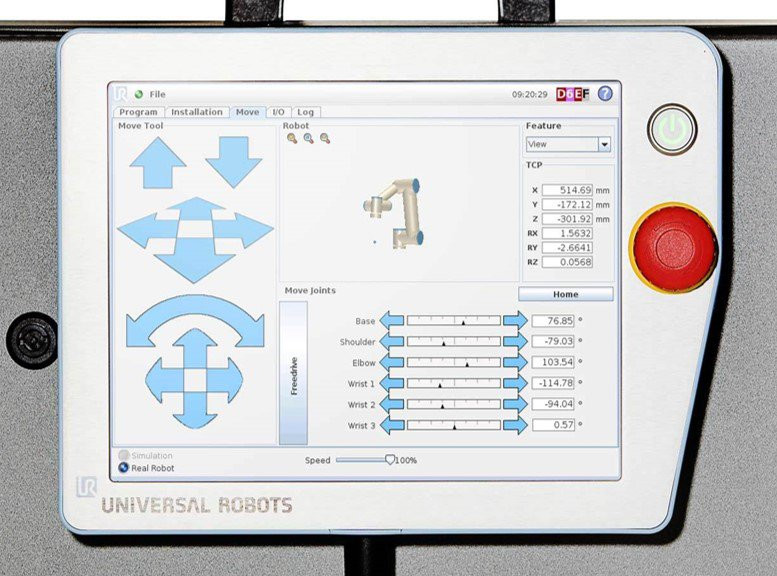
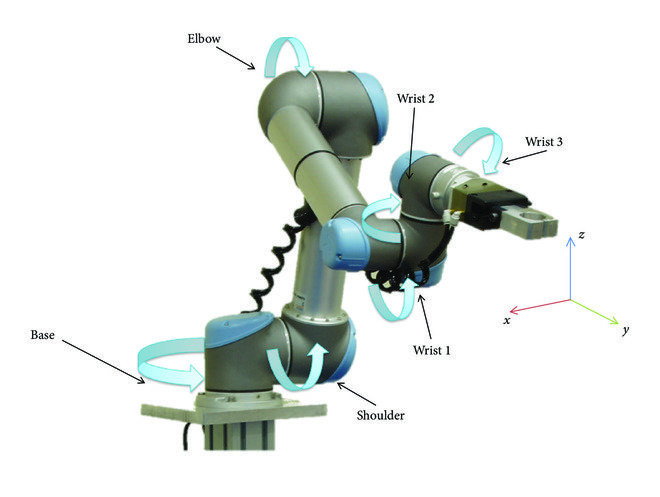
左邊的Move Tool就是可以任意移動手臂,右下邊Move Joint的BASE/SHOULDER/ELBOW/WRIST1/WRIST2/WRIST3 分別代表手臂從底座到手臂前端的位置, Joint的各個名稱可以參考下圖,使用者可依據螢幕相對應的手臂關節名稱用刻度表或左右箭頭來調整角度。
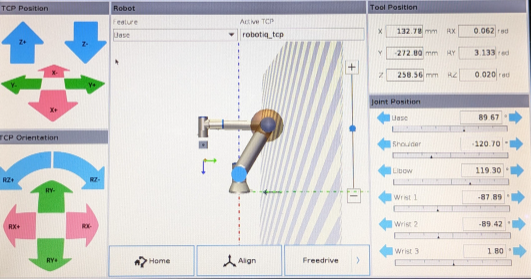
可以從上方的Robot畫面看到模擬的手臂,也能對應到現實手臂的位置,最右邊的feature,也可以自行輸入數值,這邊比較可以放心的是,如果移動過大,手臂還是會即時觸動安全碰撞機制而停止,當然,如果可以的話,初期還是用手動的按紅色緊急按鈕是最方便的。
別忘了最底下的Speed是調整移動速度,如果是新手,建議調整到低速。
真的不會的話,也可以參考下面的影片:
這邊有個小彩蛋,如果你是用視圖的話,視點是以Virtual Camera為主,要切換到Base基座,才會看到彩色的箭頭。
Reference: The Design and Evaluation of an Ergonomic Contactless Gesture Control System for Industrial Robots


 iThome鐵人賽
iThome鐵人賽