接下來要開始安裝ROS啦!首先進入ROS的官方網站,你會看到有幾個版本的ROS可以下載,像是ROS Melodic Morenia、Lunar Loggerhead和Kinetic Kame,這時候一定會很疑惑,那到底要選擇哪一個呢?
其實這幾個版本在ROS wiki裡面都有介紹,ROS一年會出一個版本,而命名的開頭會以字母順序遞增,像是2016年出了Kinetic Kame,之後就出了Lunar Loggerhead,因此可以推斷出M開頭的Melodic Morenia是最新的版本囉!而且是今年5月才新出的版本,超級熱騰騰上架的呢!

(EOL = END OF LIFE,表示停止支援該版本的日期)
ROS的版本基本上是跟著Ubuntu的版本一起走的,所以2014、2016年和2018年都是出LTS的版本,可以用5年,其他年出的就只會支援2年就更新換下一個版本,因此為了長遠的打算,當然要選LTS版本的啦!
使用版本: Kinetic Kame
至於為什麼我會選擇Kinetic Kame而不是最新的Melodic Morenia呢? 因為它實在太新了,可能會有一些package尚未移植的問題產生,因此就連官方都建議先用Kinetic Kame而不是Melodic Morenia呢! 不過若是2019年開始,應該就可以安全使用Melodic Morenia啦! 總之我們還是依照官方建議的為主來安裝環境吧XD
Kinetic Kame 是2016年出的版本,主要是針對Ubuntu 16.04的更新,但也可以在其他的Linux作業系統上執行,因此需要一台Linux系統的電腦或是虛擬機,關於虛擬機的教學我想版上已經有很多文章了,我就不在此贅述啦!
我使用的是Nvidia Tx1嵌入式開發版,系統是Ubuntu 16.04 desktop
安裝其實也蠻簡單的,就是依照ROS官方的安裝教學,選擇使用的作業系統,就可以照著他的教學步驟一步步安裝囉!
需要去ubuntu的系統設定中把restricted、universe和multiverse的下載設定打開,這樣才能從網路中下載ROS需要的相關套件。如果不知道如何設定,可以看ubuntu的官方教學。
輸入以下指令將ROS的下載連結與金鑰設定好,以便接下來的下載,注意這兩個指令都需要使用sudo執行。
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
在安裝ROS之前,要先確定ubuntu的套件管理系統已經更新到最新版本:
$ sudo apt-get update
接著就可以選擇要如何安裝我們的ROS啦!
ROS有提供三種不同的客製化安裝方法,分別為Desktop-Full、Desktop和ROS-Base,其中Base版本是最簡易版,只有安裝一些最基本的函式庫,也沒有圖形化介面。而Desktop-Full板就是全部都有啦,也是最大包的一個,安裝時間也最長。Desktop就是介於兩者之間,除了基本函示庫以外,也有一些常用的圖形化介面工具。
而我使用的是Desktop-Full版,希望可以把裡面的功能全部玩一遍~
選定好安裝的檔案後,接下來就是漫長的等待...(請在網路穩定的地方進行,小妹我在第一次安裝的時候就因為網路斷了沒發現,等超久的QQQQ)
忘了說,如果之後需要安裝別的套件的話,需要輸入:
$ sudo apt-get install ros-kinetic-PACKAGE
其中PACKAGE指的就是想要安裝的套件名稱,例如要裝SLAM地圖建置的套件的話,就須輸入以下指令:
$ sudo apt-get install ros-kinetic-slam-gmapping
rosdep是一個方便人管理安裝包的工具,大概就跟隔壁web棚裡面的composer或npm差不多吧~ 需要注意的是以下兩個指令一個要用sudo執行,另外一個不需要喔!
$ sudo rosdep init
$ rosdep update
其實到這邊,我們已經安裝完成! 不過為了之後方便執行,需要把ROS的指令加入環境變數中,以後就可以直接呼叫啦!
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
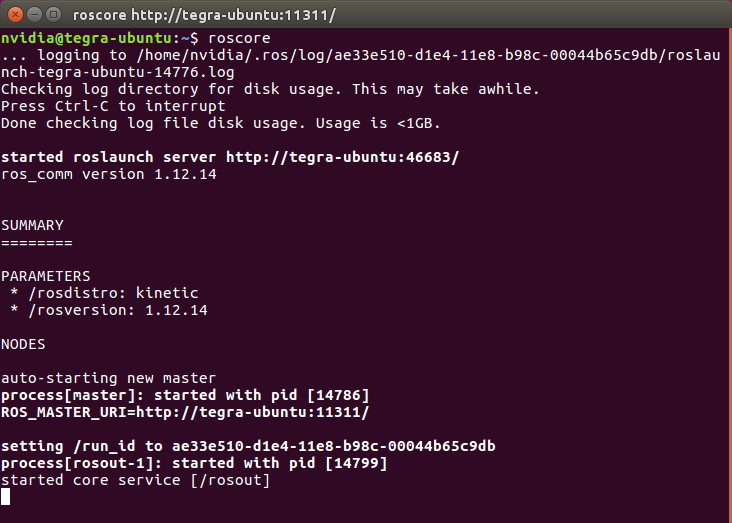
安裝完成後,輸入roscore看看是否成功執行,如果出現以下畫面,恭喜你,安裝成功啦! 下一篇就可以正式開始玩裡面的功能囉~