進入架構的說明,建議與
[day-08] 番外 - U-net的程式碼實現 (1) - Conv2D
[day-09] 番外 - U-net的程式碼實現 (2) - pooling
一起食用。
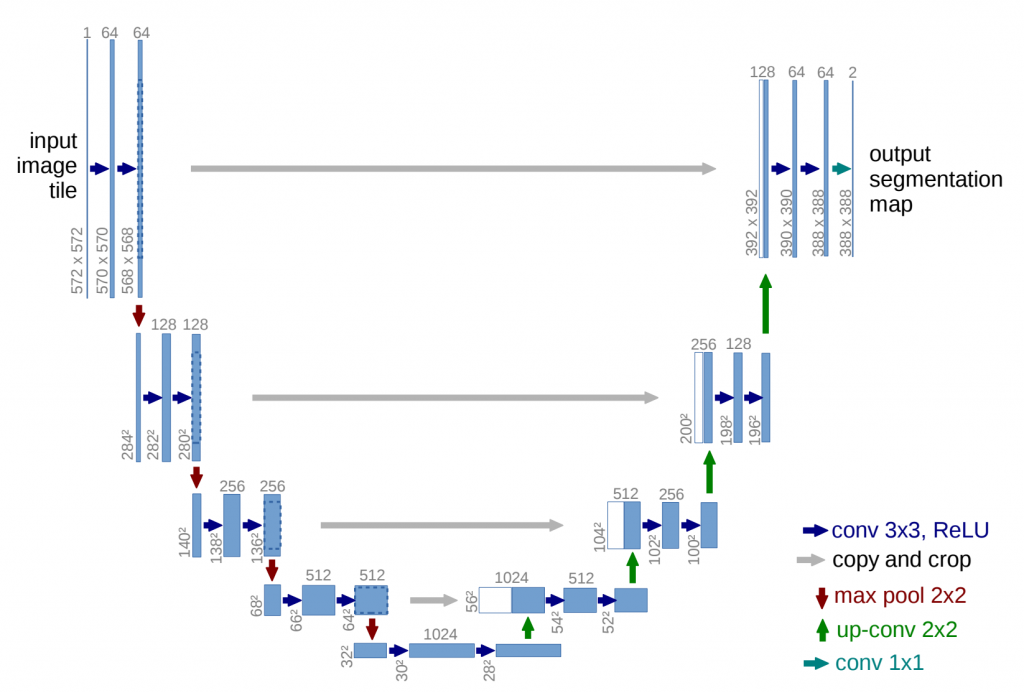
The network architecture is illustrated in Figure 1. It consists of a contracting path (left side) and an expansive path (right side).
首先介紹左邊的架構。
The contracting path follows the typical architecture of a convolutional network. It consists of the repeated application of two 3x3 convolutions (unpadded convolutions), each followed by a rectified linear unit (ReLU) and a 2x2 max pooling operation with stride 2 for downsampling. At each downsampling step we double the number of feature channels.
Every step in the expansive path consists of an upsampling of the feature map followed by a 2x2 convolution ("up-convolution") that halves the number of feature channels, a concatenation with the correspondingly cropped feature map from the contracting path, and two 3x3 convolutions, each followed by a ReLU.
右邊的架構
The cropping is necessary due to the loss of border pixels in every convolution. At the final layer a 1x1 convolution is used to map each 64-component feature vector to the desired number of classes. In total the network has 23 convolutional layers. To allow a seamless tiling of the output segmentation map (see Figure 2), it is important to select the input tile size such that all 2x2 max-pooling operations are applied to a layer with an even x- and y-size.
我印象種後續還有出一些改良型的U-net,後續有空再介紹,明天繼續說明U-net實作。
[0] U-net

