今天介紹步進馬達,疑?昨天不是才說過馬達嗎?昨天的是伺服馬達,今天的則是伺服馬達
這兩者有甚麼不一樣嗎?伺服馬達能轉到指定的角度,但是步進馬達則是轉過指定的角度,甚麼意思呢?
伺服馬達控制轉到75°位置,可是步進馬達是以目前為初始方向連續轉75°,步進馬達沒有像伺服馬達限制角度範圍所以可以一直轉。
| 伺服馬達 | 步進馬達 |
|---|---|
| 轉到指定角度 | 轉過指定角度 |
| 3條線 | 4~6條線 |
步進馬達採用脈衝信號驅動,每次以一定角度逐步轉動,可簡單實現精準的定位運轉,在機器人領域上也得到廣泛的應用。

步進馬達因為需要足夠多的電流供給,所以通常會搭配 IC ULN2003驅動作使用。
我們可以透過控制1~4腳輸出不同的變化讓馬達連續運轉,如下表剛好是一個循環,一個循環大約旋轉0.7度
| step | A | B | C | D |
|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
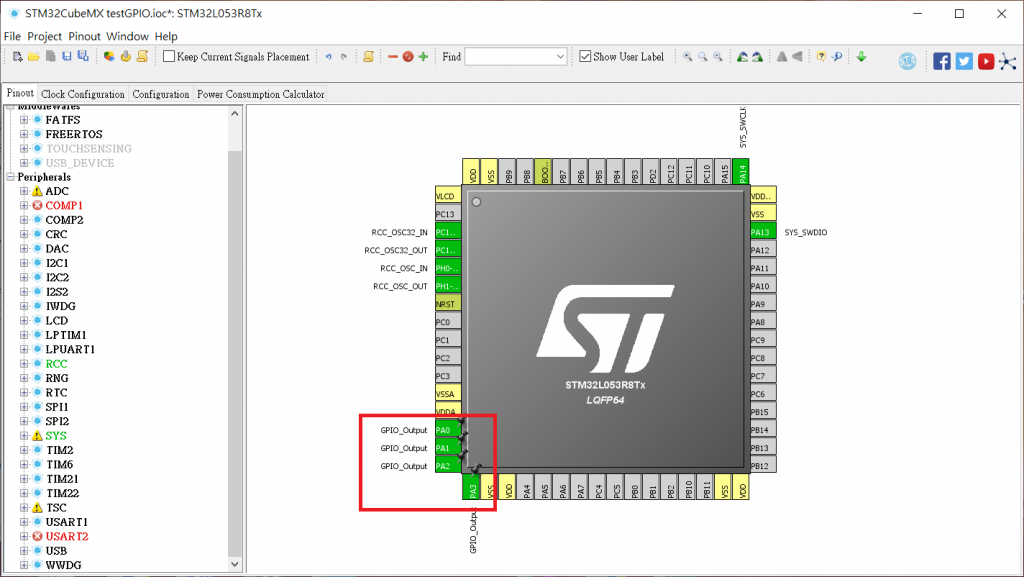
基本設定:
RCC → HSE、LSE → Crystal/Ceramic Resonator✅
SYS → Debug Serial Wire ✅
額外設定:
GPIOA → PA0 ~ PA3 → GPIO_Output

最快32MHz
// 正轉
while(1)
{
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_0 , GPIO_PIN_SET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_1 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_2 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_3 , GPIO_PIN_RESET );
HAL_Delay(1);
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_0 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_1 , GPIO_PIN_SET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_2 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_3 , GPIO_PIN_RESET );
HAL_Delay(1);
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_0 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_1 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_2 , GPIO_PIN_SET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_3 , GPIO_PIN_RESET );
HAL_Delay(1);
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_0 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_1 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_2 , GPIO_PIN_RESET );
HAL_GPIO_WritePin (GPIOA , GPIO_PIN_3 , GPIO_PIN_SET );
HAL_Delay(1);
}
- STM32 Nucleo-64 boards (MB1136)資料手冊
https://www.st.com/resource/en/user_manual/dm00105823-stm32-nucleo-64-boards-mb1136-stmicroelectronics.pdf- STM32L053R8 datasheet
https://www.st.com/resource/en/datasheet/stm32l053r8.pdf- RM0367 Reference manual Ultra-low-power STM32L0x3 advanced Arm®-based 32-bit MCUs
https://www.st.com/resource/en/reference_manual/dm00095744-ultra-low-power-stm32l0x3-advanced-arm-based-32-bit-mcus-stmicroelectronics.pdf- ARM Mbed官網介紹 - NUCLEO-L053R8
https://os.mbed.com/platforms/ST-Nucleo-L053R8/- STM32 官網介紹 - STM32L053R8
https://www.st.com/en/microcontrollers-microprocessors/stm32l053r8.html#overview
- 此開發板售價在臺幣1000元以下,讀者可於以下網站購得:
https://www.mouser.tw/
https://www.digikey.tw/
30天好快

