這篇教學會介紹如何透過 OpenCV 追蹤特定的顏色,並在追蹤到顏色的時候,使用繪圖的方式標記顏色區域 ( 會使用 inRange、dilate、boundingRect、findContours...等方法 )。
原文參考:追蹤並標記特定顏色
因為程式中的 OpenCV 會需要使用鏡頭或 GPU,所以請使用本機環境 ( 參考:使用 Python 虛擬環境 ) 或使用 Anaconda Jupyter 進行實作 ( 參考:使用 Anaconda ) ,並安裝 OpenCV 函式庫 ( 參考:OpenCV 函式庫 )。
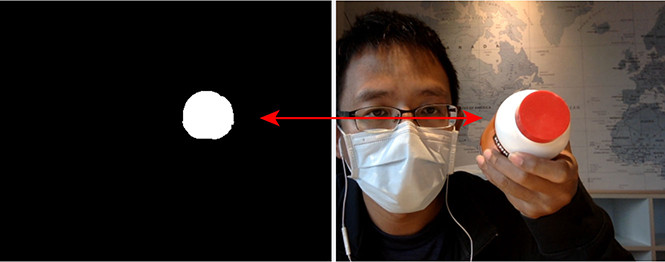
參考「抓取影像的特定顏色」文章範例,抓取影像中的特定顏色,但抓取到的顏色範圍內,可能會有因為反光或陰影產生的雜訊,這時可以參考「影像的侵蝕與膨脹」文章範例,讓程式抓取影像中的特定顏色後,使用「膨脹」的方式移除顏色內的雜訊,完成後再利用「侵蝕」縮回原本的大小。
import cv2
import numpy as np
lower = np.array([30,40,200]) # 轉換成 NumPy 陣列,範圍稍微變小 ( 55->30, 70->40, 252->200 )
upper = np.array([90,100,255]) # 轉換成 NumPy 陣列,範圍稍微加大 ( 70->90, 80->100, 252->255 )
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Cannot open camera")
exit()
while True:
ret, img = cap.read()
if not ret:
print("Cannot receive frame")
break
img = cv2.resize(img,(640,360)) # 縮小尺寸,加快處理速度
output = cv2.inRange(img, lower, upper) # 取得顏色範圍的顏色
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (11, 11)) # 設定膨脹與侵蝕的參數
output = cv2.dilate(output, kernel) # 膨脹影像,消除雜訊
output = cv2.erode(output, kernel) # 縮小影像,還原大小
cv2.imshow('oxxostudio', output)
if cv2.waitKey(1) == ord('q'):
break # 按下 q 鍵停止
cap.release()
cv2.destroyAllWindows()
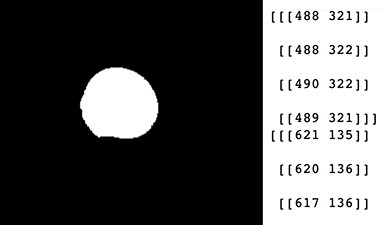
取得特定顏色後,使用 findContours 抓取顏色範圍的輪廓座標,並透過 for 迴圈印出座標。
import cv2
import numpy as np
lower = np.array([30,40,200])
upper = np.array([90,100,255])
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Cannot open camera")
exit()
while True:
ret, img = cap.read()
if not ret:
print("Cannot receive frame")
break
img = cv2.resize(img,(640,360))
output = cv2.inRange(img, lower, upper)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (11, 11))
output = cv2.dilate(output, kernel)
output = cv2.erode(output, kernel)
# cv2.findContours 抓取顏色範圍的輪廓座標
# cv2.RETR_EXTERNAL 表示取得範圍的外輪廓座標串列,cv2.CHAIN_APPROX_SIMPLE 為取值的演算法
contours, hierarchy = cv2.findContours(output, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 使用 for 迴圈印出座標長相
for contour in contours:
print(contour)
cv2.imshow('oxxostudio', output)
if cv2.waitKey(1) == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
取得輪廓的座標後,使用 contourArea 計算輪廓座標包覆的面積,如果面積大於 300 再進行繪圖 ( 避免偵測到背景太小的區域 ),繪圖使用 line 的方法,將每一個座標點連在一起。
import cv2
import numpy as np
lower = np.array([30,40,200])
upper = np.array([90,100,255])
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Cannot open camera")
exit()
while True:
ret, img = cap.read()
if not ret:
print("Cannot receive frame")
break
img = cv2.resize(img,(640,360))
output = cv2.inRange(img, lower, upper)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (11, 11))
output = cv2.dilate(output, kernel)
output = cv2.erode(output, kernel)
contours, hierarchy = cv2.findContours(output, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
area = cv2.contourArea(contour) # 取得範圍內的面積
color = (0,0,255) # 設定外框顏色
# 如果面積大於 300 再標記,避免標記到背景中太小的東西
if(area > 300):
for i in range(len(contour)):
if i>0 and i<len(contour)-1:
# 從第二個點開始畫線
img = cv2.line(img, (contour[i-1][0][0], contour[i-1][0][1]), (contour[i][0][0], contour[i][0][1]), color, 3)
elif i == len(contour)-1:
# 如果是最後一個點,與第一個點連成一線
img = cv2.line(img, (contour[i][0][0], contour[i][0][1]), (contour[0][0][0], contour[0][0][1]), color, 3)
cv2.imshow('oxxostudio', img)
if cv2.waitKey(1) == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
![]()
如果想用四邊形標記特定顏色,可以使用 boundingRect 取得輪廓的 xy 座標和長寬尺寸,再透過 rectangle 繪製四邊形。
import cv2
import numpy as np
lower = np.array([30,40,200]) # 轉換成 NumPy 陣列,範圍稍微變小 ( 55->30, 70->40, 252->200 )
upper = np.array([90,100,255]) # 轉換成 NumPy 陣列,範圍稍微加大 ( 70->90, 80->100, 252->255 )
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Cannot open camera")
exit()
while True:
ret, img = cap.read()
if not ret:
print("Cannot receive frame")
break
img = cv2.resize(img,(640,360))
output = cv2.inRange(img, lower, upper)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (11, 11))
output = cv2.dilate(output, kernel)
output = cv2.erode(output, kernel)
contours, hierarchy = cv2.findContours(output, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
area = cv2.contourArea(contour)
color = (0,0,255)
if(area > 300):
x, y, w, h = cv2.boundingRect(contour) # 取得座標與長寬尺寸
img = cv2.rectangle(img, (x, y), (x + w, y + h), color, 3) # 繪製四邊形
cv2.imshow('oxxostudio', img)
if cv2.waitKey(1) == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
![]()
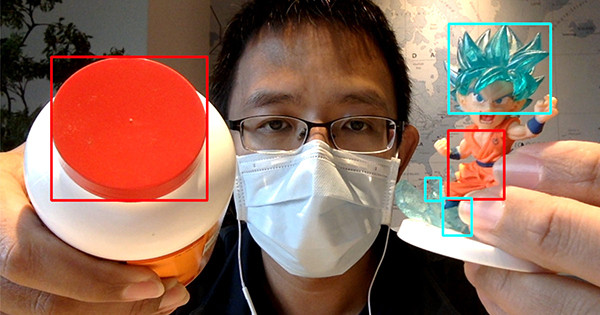
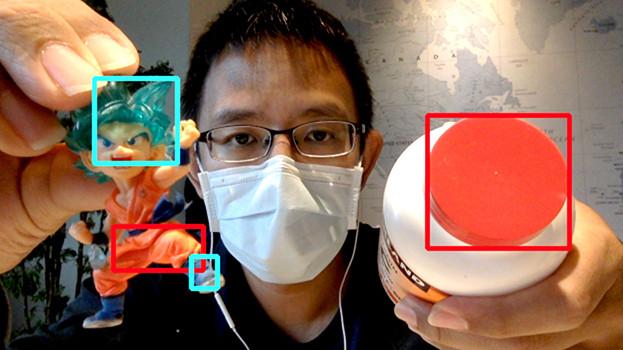
運用同樣的做法,只要知道顏色範圍,就可以追蹤各種不同的顏色,下方的程式碼執行後,可以追蹤兩種不同的顏色。
import cv2
import numpy as np
lower = np.array([30,40,200])
upper = np.array([90,100,255])
blue_lower = np.array([90,100,0]) # 設定藍色最低值範圍
blue_upper = np.array([200,160,100]) # 設定藍色最高值範圍
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Cannot open camera")
exit()
while True:
ret, img = cap.read()
if not ret:
print("Cannot receive frame")
break
img = cv2.resize(img,(640,360))
output = cv2.inRange(img, lower, upper)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (11, 11))
output = cv2.dilate(output, kernel)
output = cv2.erode(output, kernel)
contours, hierarchy = cv2.findContours(output, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
area = cv2.contourArea(contour)
color = (0,0,255)
if(area > 300):
x, y, w, h = cv2.boundingRect(contour)
img = cv2.rectangle(img, (x, y), (x + w, y + h), color, 3)
# 設定選取藍色的程式
blue_output = cv2.inRange(img, blue_lower, blue_upper)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (11, 11))
blue_output = cv2.dilate(blue_output, kernel)
blue_output = cv2.erode(blue_output, kernel)
contours, hierarchy = cv2.findContours(blue_output, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
area = cv2.contourArea(contour)
color = (255,255,0)
if(area > 300):
x, y, w, h = cv2.boundingRect(contour)
img = cv2.rectangle(img, (x, y), (x + w, y + h), color, 3)
cv2.imshow('oxxostudio', img)
if cv2.waitKey(1) == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
大家好,我是 OXXO,是個即將邁入中年的斜槓青年,我已經寫了超過 400 篇 Python 的教學,有興趣可以參考下方連結呦~ ^_^


 iThome鐵人賽
iThome鐵人賽