今天又是充滿數學的一天啊
還記得在 [Day 19] Diffusion Model 的數學原理(一)的最後,我們得出了 diffusion model 的學習目標: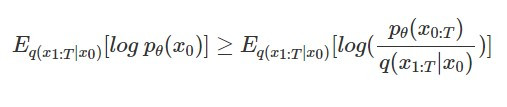
今天我們會從這個學習目標出發,得到最後我們在演算法看到生成過程如何 denoise 的數學形式: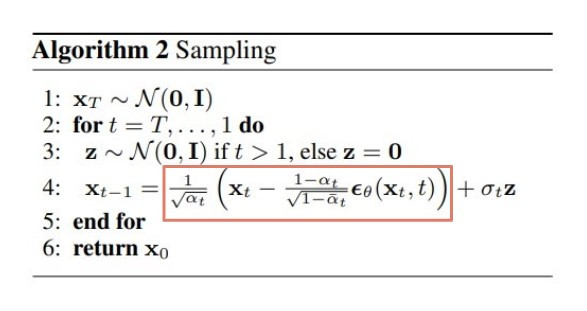
(圖片來源:Denoising Diffusion Probabilistic Models)
那就直接開始吧!
首先,根據 Understanding Diffusion Models: A Unified Perspective 中的推導,我們可以將 diffusion model 要最大化的 lower bound 寫成以下三項:
至於中間是如何推導的呢?有興趣的話可以參考這個來自 paper 的截圖,但不看應該也不會影響理解太多: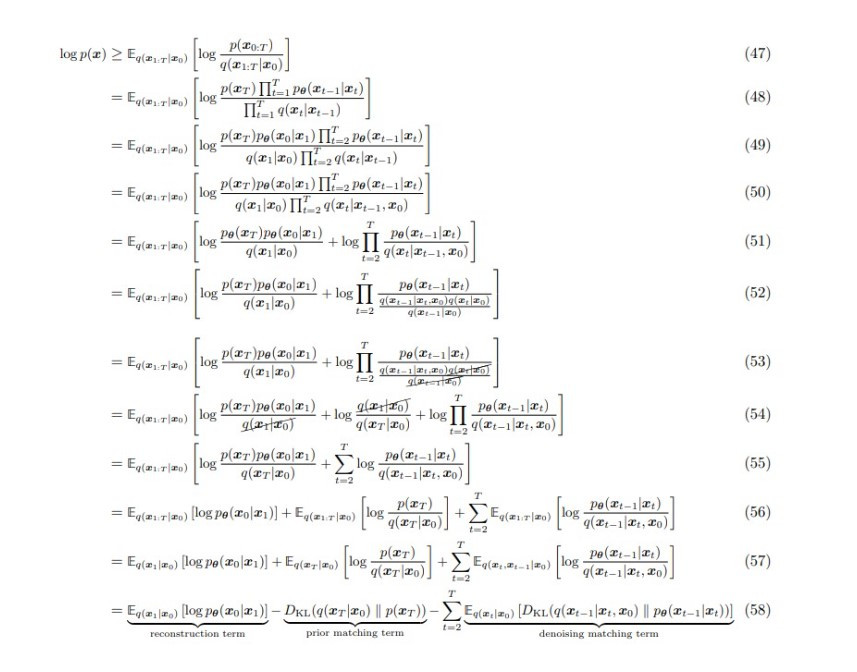
(圖片來源:Understanding Diffusion Models: A Unified Perspective)
那推導出來的這三項分別代表以下的涵義:
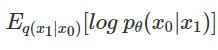 :意義接近 VAE 的 reconstruction term,也就是 denoise 後的影像和原本乾淨的影像有多接近
:意義接近 VAE 的 reconstruction term,也就是 denoise 後的影像和原本乾淨的影像有多接近 :prior matching term,它代表加 noise 的影像最終多接近先驗的 Gaussian distribution,由於加 noise 的部分和模型參數完全無關,因此在後面的計算可以忽略
:prior matching term,它代表加 noise 的影像最終多接近先驗的 Gaussian distribution,由於加 noise 的部分和模型參數完全無關,因此在後面的計算可以忽略 :denoising matching term,評估每一步 denoise 的結果和加 noise 前是否接近,
:denoising matching term,評估每一步 denoise 的結果和加 noise 前是否接近, 代表的是 ground truth signal,也就是在已知 x_0 和 x_t 的情況下要如何 denoise 得到 x_(t-1);而
代表的是 ground truth signal,也就是在已知 x_0 和 x_t 的情況下要如何 denoise 得到 x_(t-1);而  則是模型學出來的 denoise 函數
則是模型學出來的 denoise 函數由於和演算法中 denoise 過程有關的是第三項  ,因此接下來會繼續從這一項推導~
,因此接下來會繼續從這一項推導~
其中 ground truth signal  經過一連串複雜的推導後,會發現它其實也是一個 Gaussian distribution,mean 是
經過一連串複雜的推導後,會發現它其實也是一個 Gaussian distribution,mean 是  ,sigma 是
,sigma 是  :
:
(圖片來源:Understanding Diffusion Models: A Unified Perspective)
而 diffusion model 要學出的 denoise 函數  也是一個 Gaussian distribution,由於它的 mean 是可以被訓練的,sigma 是固定的,因此要拉近
也是一個 Gaussian distribution,由於它的 mean 是可以被訓練的,sigma 是固定的,因此要拉近  和
和  兩個機率分布,就是要讓可被訓練的 mean 和 ground truth 的 mean
兩個機率分布,就是要讓可被訓練的 mean 和 ground truth 的 mean  越接近越好。
越接近越好。
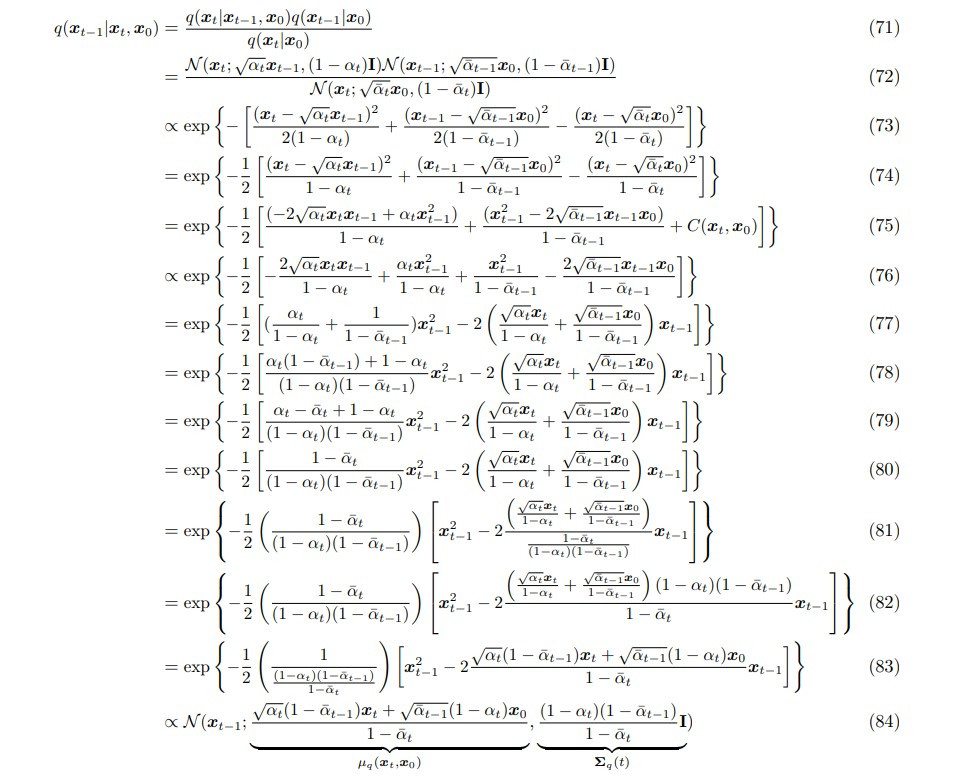
由於我們知道 x_0 和 x_t 的關係:
(圖片來源:Understanding Diffusion Models: A Unified Perspective)
我們可以將上面的等式代入  ,讓它只與 x_t 相關:
,讓它只與 x_t 相關: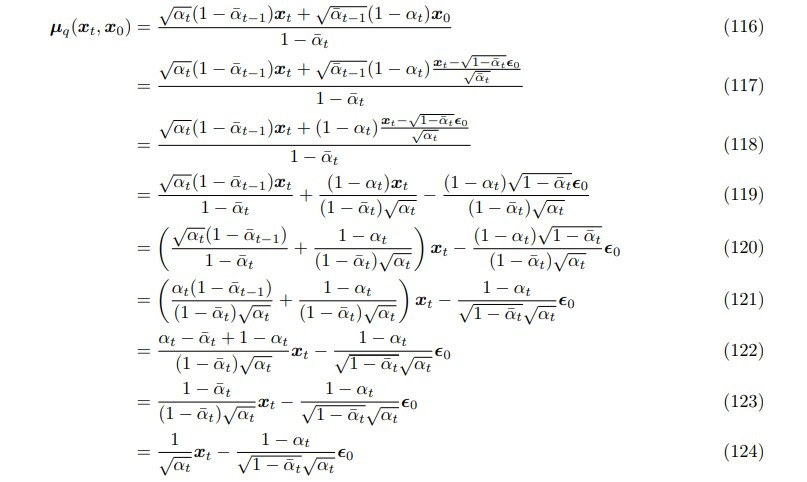
(圖片來源:Understanding Diffusion Models: A Unified Perspective)
最後就得到演算法中 denoise 過程的數學形式 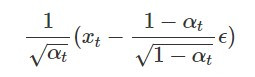 了!
了!
不過實際上在 denoise 的時候,我們並不會直接讓模型輸出機率分布最高的值(也就是 Gaussian distribution 的 mean),這樣缺乏隨機性的過程通常反而是對生成結果有害的,取而代之的是我們會從 Gaussian distribution 抽樣,這也就是為什麼演算法中會寫 denoise 過程中還要加上隨機抽樣的 noise: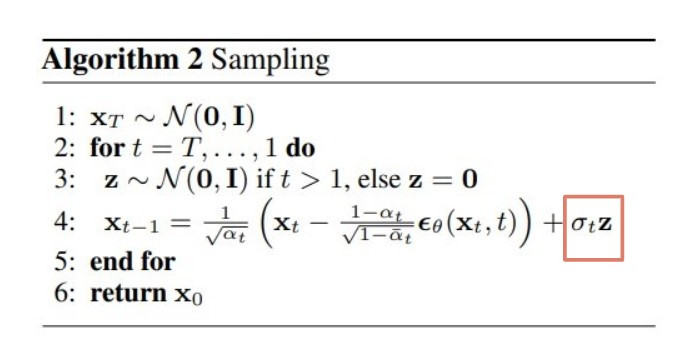
(圖片來源:Denoising Diffusion Probabilistic Models)

