在上一篇文章中,我們介紹了什麼是梯度 (Gradient) 和梯度下降 (Gradient Descent),並舉例說明了學習率 (learning rate) 的作用。昨天我們提到了「局部最小值 (local minima)」,今天我們將進一步討論模型訓練過程中常見的問題——局部最小值與鞍點 (saddle point)。
在訓練模型時,隨著參數的更新,Loss 通常會逐漸下降。但在某些情況下,Loss 可能會停滯,即使我們認為模型還有改進空間,卻無法繼續下降。這時,我們需要探討可能導致訓練卡住的原因。
為什麼會卡住呢?回顧一下,梯度下降依賴於函數梯度的反方向進行更新。如果某一點的偏微分為 0,梯度下降將無法繼續前進。
訓練過程中,當模型卡住時,我們通常認為是因為陷入了局部最小值。這是因為梯度下降的初始值是隨機的,可能會帶我們進入一個局部谷底,即局部最小值。然而,這不一定是全局最小值。
除了局部最小值,鞍點也是訓練卡住的另一個原因。鞍點的形狀像馬鞍,前後翹起,兩側較低,且在該點的偏微分也為 0。
這兩種情況都可能導致訓練停滯,因此我們將這類點統稱為「臨界點」。
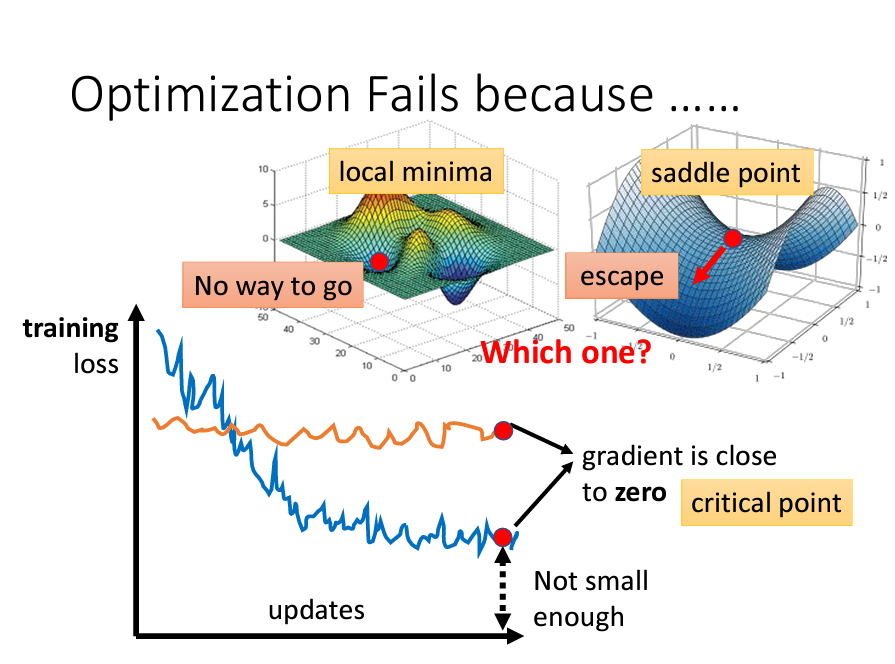
當訓練模型卡住時,我們需要判斷當前的臨界點是局部最小值還是鞍點。如果是局部最小值,代表我們已經達到該區域的最低點;而如果是鞍點,則仍有下降空間,Loss 可以進一步優化。
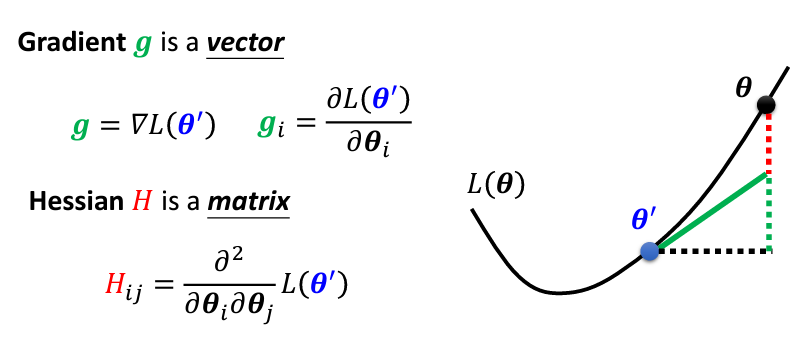
那麼,我們如何判斷當前的臨界點是哪一種呢?可以透過泰勒級數來幫助分析。其公式如下:

符號解釋:
該公式表示的是在 θ = θ′ 附近,將目標函數 L(θ) 用二次多項式進行近似,從而更容易分析和優化目標函數。如果此時我們處於臨界點,公式中的梯度項(綠色框)將為 0,損失函數近似等於 L(θ′) + 紅色框部分:
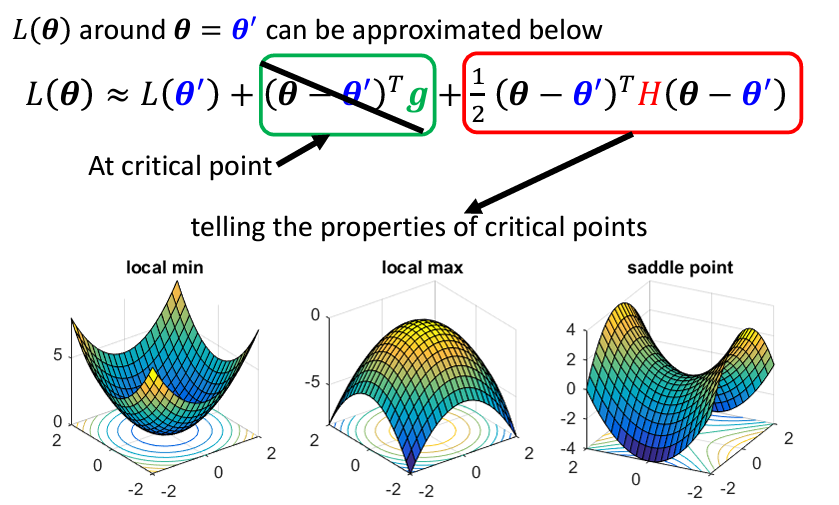
接下來,我們可以根據 Hessian matrix 來判斷 θ′ 附近的形狀。為了方便起見,我們將 θ - θ′ 替換為向量 v 表示:
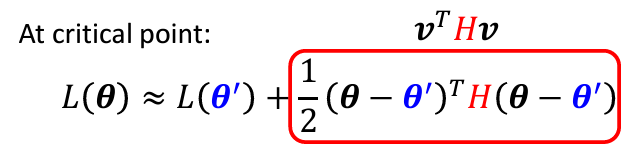
 這個式子用來判斷不同方向上的曲率,代表某方向
這個式子用來判斷不同方向上的曲率,代表某方向 v 上的 Hessian 值的內積。根據這個值的正負,可以判斷臨界點的性質:
對於所有的𝑣:
> 0 表示為Local Minima < 0 表示為Local Maxima > 0, 有時 < 0, 表示為當前的點所在的地方正處於Saddle Point不過,這樣逐個方向進行計算會非常低效,因此我們可以通過計算 Hessian matrix 的eigen values來判斷:
Hessian matrix 不僅能幫助我們判斷當前地形,還能指出參數更新的方向。在訓練過程中,當走到臨界點時,梯度項 g 為 0,因此我們無法依賴梯度更新參數,此時需要依賴 Hessian matrix。如果確定處於鞍點,我們可以進行以下操作:
假設𝒖是 H 的特徵向量,𝜆是其對應的特徵值。我們將 v 替換為𝒖,得到:

這表示我們可以將參數向量沿著𝒖方向進行移動,從而降低 Loss:



 iThome鐵人賽
iThome鐵人賽