參考資料:
1. 雷射雷達(LiDAR)vs. 雷達(RADAR)
2. Light Detection and Ranging (LiDAR)
3. Seeed blog_RPLIDAR AND ROS PROGRAMMING- THE BEST WAY TO BUILD ROBOT
4. ROS.org_rplidar
• Triangle、TOF
Laser triangulation - operating principle
3D 感測技術:什麼是飛時測距(ToF:Time of Flight)
• LiDAR Application
自動駕駛、機器人、醫療、軍事、環境生態監測、智慧城市的建設……
• 其他感測器(Distance Sensor、Vision Sensor、Depth Camera…)介紹
○ 距離有關的sensor:
超音波、紅外線…
○ 視覺有關的sensor:
提供除了部件是否存在之外的信息。視覺傳感器可以檢測每個目標的多個元素,區分顏色,並 對未對準和計劃的可變性做出很好的響應。通過減少缺陷和提高產量,機器視覺傳感器可以幫助製造商簡化其運營並提高盈利能力。
○ 深度相機:
通常就是有兩個鏡頭以上,例如這三顆:傳統RGB鏡頭+紅外線鏡頭與、紅外線雷射投影機,就能從2D平面之影像多一個偵測攝影機前方之紅外線反射量而有了「深度」。
#以上是課程規劃要學習的東西?不知道重點在哪= =?
以下是我想知道的
雷射雷達(LiDAR)vs. 雷達(RADAR)重點節錄:
#LiDAR運行原理
LiDAR傳感器快速發射雷射脈衝(通常最高可達每秒150000次脈衝),雷射信號到達障礙物後反射回LiDAR傳感器。傳感器通過測量雷射信號從發射到返回的時間,精確計算確定傳感器到障礙物之間的距離,它還能探測目標物體的準確尺寸。LiDAR通常用於高解析度地圖的繪製。
#RADAR運行原理
RADAR系統的工作原理跟LiDAR很相似,唯一的區別在於RADAR採用的是無線電波而非雷射。在RADAR系統中,其天線既可以作為雷達接收器也可以作為發射器。不過,和光波相比,在與被測物體接觸時,無線電波的吸收較少,因此,RADAR的有效工作距離相對更遠。RADAR技術最廣為人知的應用,應該是軍事用途了。飛機和戰艦都會裝備RADAR來測量高度,或探測附近其它的運輸設備和物體。
| . | LiDAR | RADAR |
|---|---|---|
| 優點 | 技術=數位攝影+雷射測距儀;高精度;快速覆蓋大面積的能力;可以在陡峭的地形和陰影中收集數據 | 在霧、雨、雪和揚塵等所有天氣條件下,均能穩定運行;可以利用都卜勒頻移精確地確定相對行駛速度和移動物體的速度;便宜 |
| 缺點 | 較貴;無法穿透非常密集的頂篷會導致高程模型誤差;非常大的數據集,難以解釋和處理;沒有國際協議 | 角度精度略低,在彎道上會丟失目標車輛;多個探測對象彼此靠得很近,它可能會出現識別困難 |
#會想先比較LiDAR跟RADAR是因為想知道學術用跟業界用購買哪個的決策依據
接下來的篇幅只講光達:
RPLIDAR是適用於室內機器人SLAM應用的低成本LIDAR傳感器。產生的2D點雲數據可用於製圖,定位和對象/環境建模。RPLIDAR將成為SLAM(同步定位和地圖繪製)研究中的絕佳工具
開源的ROS可以從rplidar相關的github或wiki找到資源,主要是:
#兩個服務(Services)
stop_motor跟start_motor;
#一個主題(Topics)
scan;
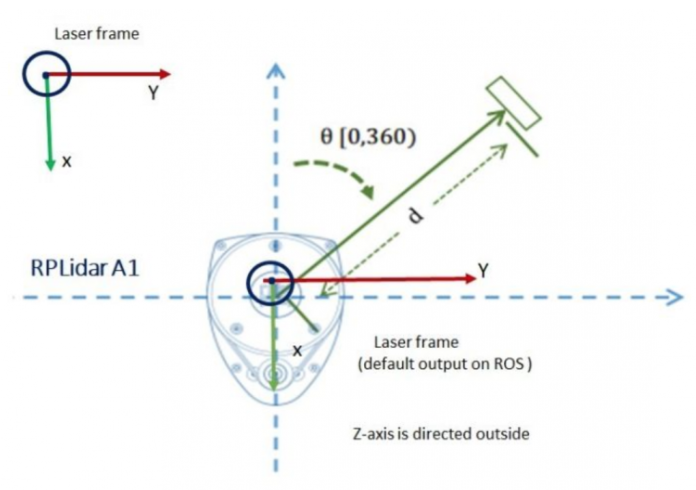
#實際使用情況取決於端口號(serial_port)、坐標系統名稱(frame_id)、正向和反向 (inverted)的特定參數;
許願池: 最便宜的美金99?求包養XD