參考資料:
1. ROBOTIS 機器人產品手冊中文翻譯
2. ROS烏龜人
3. Gazebo Tutorials
4. 使用 ROS 與 Gazebo 模擬一個自動避障機器人
Burger vs Waffle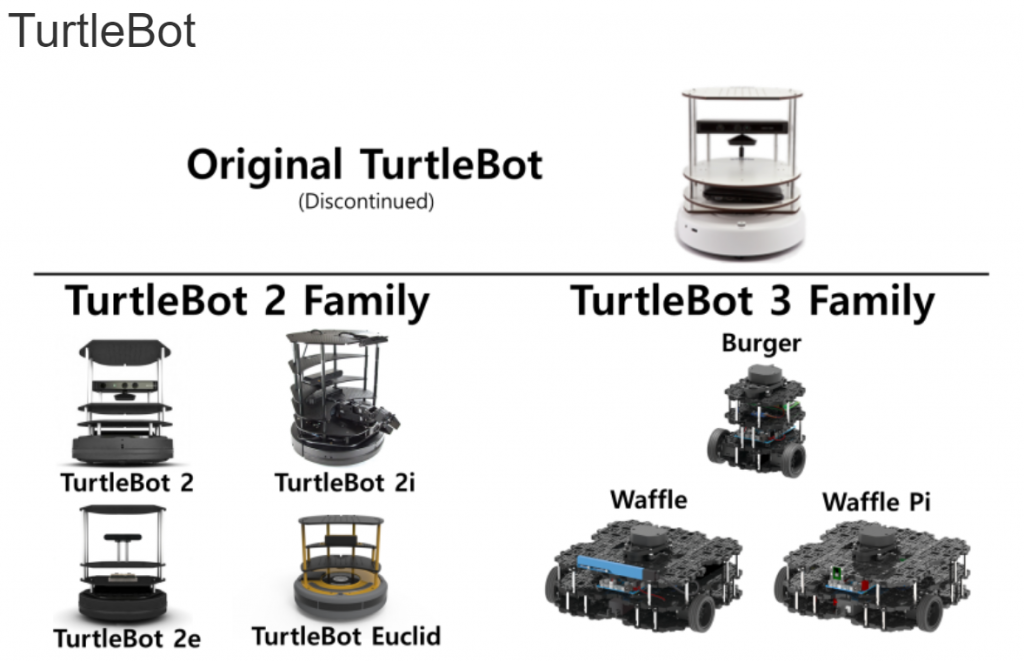
規格: https://docs.idminer.com.tw/part-1-turtlebot3/4.-gui-ge
阿如果你是indigo就參考資料3:
$ sudo apt-get install ros-indigo-turtlebot-gazebo
$ roslaunch turtlebot_gazebo turtlebot_world.launch
開始自已玩0.0
若跟我一樣是kinetic、也沒錢買TB3,或者想在仿真環境中做一些算法、應用的測試,gazebo+rviz應該是你需要的。
'''備註:
rviz是三維可視化工具,強調把已有的數據可視化顯示,做的事情就是訂閱這些數據,並完成可視化,讓開發者更容易理解數據的意義。;
gazebo是三維物理仿真平台,強調的是創建一個虛擬的仿真環境,不是顯示工具,它不需要數據,而是創造數據。
'''
以下就先從Gazebo開始建起
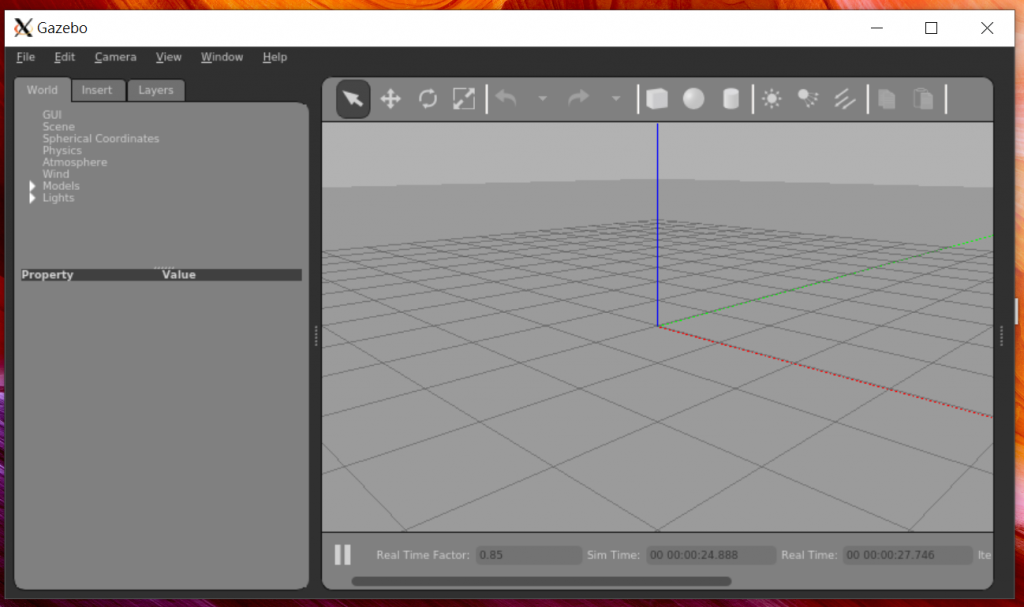
gazebo worlds/empty_sky.world可以看到會動的天空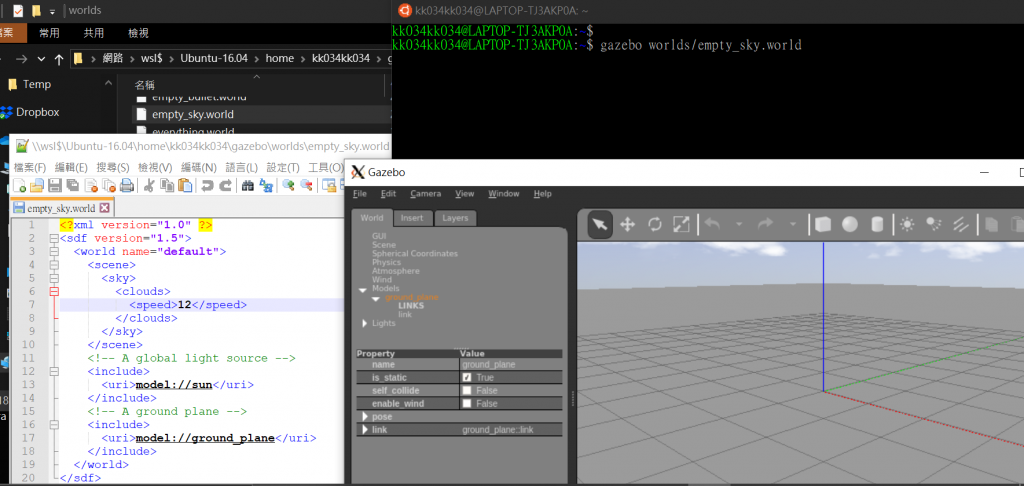
hg clone https://bitbucket.org/osrf/gazebo_models#講到這裡應該會自己從官網學習了
例如想要Connect to ROS就點進去然後看Installing gazebo_ros_pkgs (ROS 1)裡面找尋自己要的部分以及資源(甚至有步驟)

