參考資料:
1. Itread01_ROS—SLAM與Navigation
2. 【Tutorial】一起走進ROS的世界吧(3) - 小烏龜實作篇
3. TB 專欄 – 使用 Gazebo 模擬器控制機器人建立 2D 地圖
4. gmapping
• Gmapping (地圖構建開源套件)教學
沒有實體的使用邏輯是這樣的:
用GAZEBO生成數據(世界),開啟RVIZ來看數據們造成的結果,中間過程使用架構所學之設定Topic、code文檔...,這次多玩RVIZ裡面的選項這樣。
這次來玩Turtlebot入门教程-安装Turtlebot(ubuntu16.04+kinetic)
然後找了很多模擬的但都是indigo,雖然也是可以但有些部分不支援…
ROS學習--(十九)使用Gazebo模擬器
就看要不要在自己的環境下co一個出來(co出來會補)
• Gmapping操作與介紹
Gmapping演算法是目前基於鐳射雷達和里程計方案裡面比較可靠和成熟的一個演算法,它基於粒子濾波,採用RBPF的方法效果穩定。
主要是確認有裝好GAZEBO之後就執行:
確認apt-cache search ros-$ROS_DISTRO-gmapping
若無安裝sudo apt-get install ros-$ROS_DISTRO-gmapping
執行rosrun gmapping slam_gmapping
但由於gmapping演算法中需要設定的引數很多,這種啟動單個節點的效率很低,所以往往我們會把gmapping的啟動寫到launch檔案中。
• Gmapping Flow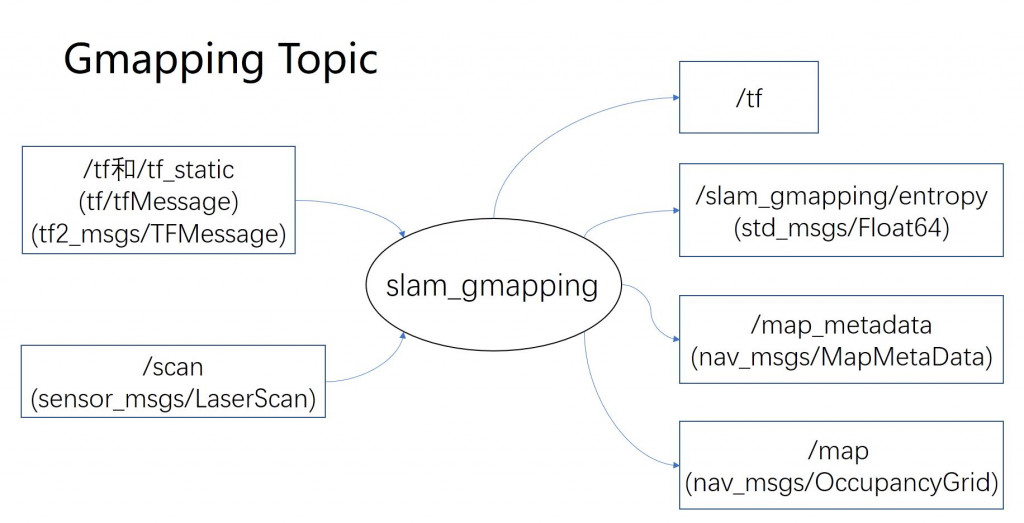
• Gmapping應用說明
找到的一些github:
turtlebot3_simulations
ROS-Academy-for-Beginners
缺點:依賴里程計(odometry),無法適用無人機及地面小車不平坦區域;無迴環;
優點:在長廊及低特徵場景中建圖效果好;
• Gmapping實作演練
可由參考資料1、3去實際跑看看


 iThome鐵人賽
iThome鐵人賽