我們不一定會知道環境的Dynamic,昨天的Taxi環境gym好心提供給我們,但如果像是更複雜的環境,比如自駕車、21點、圍棋等等。如果要將所有機率算出來,再算Value Function就有點困難。
這時候蒙利卡羅方法就有用了,還記得大數法則(Law of large numbers)嗎?只要抽樣的樣本數越多,就越能趨近期望值。
而我們說過強化學習中的Value Function,其實就是求全部Reward和的期望值:

根據大數法則,我們可以知道當我們的樣本數越多,
就離真實值越近。這種用隨機採樣來估測問題的隨機性的方法,就稱為蒙地卡羅方法。
所以我們只要跑足夠多的Epsiode,得到足夠多的,再將這些
平均(取期望值),就是
的估計值。
為在時間點
上的State的Value
演算法相當簡單,只要把所有Return平均當成期望值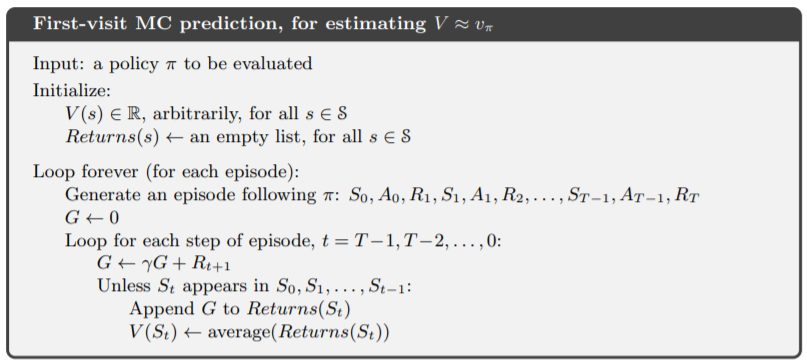
Monte Carlo Method也遵循著GPI的流程

如果我們的Policy更新一直都是以更新的話,會造成我們的Agent停止探索更多的行為。
從例子上來看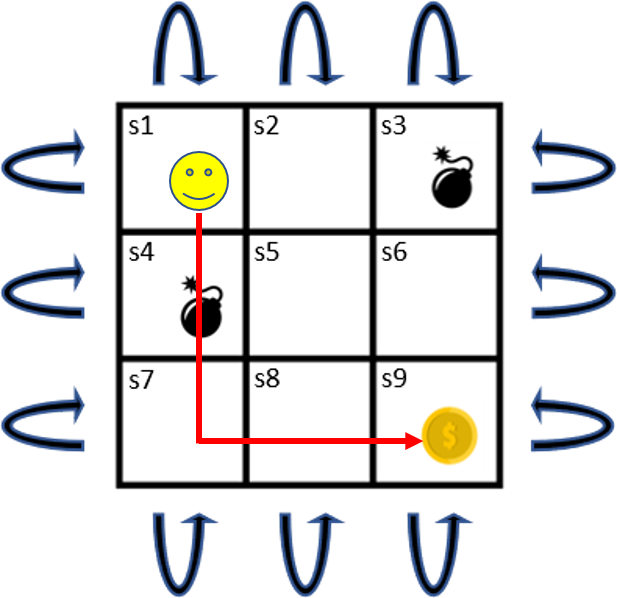
我們把每個State的Value Function都初始化為0,Agent在一開始為隨機策略,並在第一個episode走了塗上紅色的路線,獲得Reward = 5,假如為1,那根據上面的Monte Carlo Method,
的Value Function都會變為5。Policy Improvement後的
因為是根據greedy action,它會認為紅色這條路徑的Value比其他高,所以是最好的走法,導致之後的每一個episode都走同樣紅色的路線。其實不經過炸彈的Value會更高,但永遠都不會知道。
這種情況發生在用取樣方法的強化學習算法上,稱為Exploration and Exploitation trade-off。
上面的情形是因為我們只花了一個episode去exploration,導致Agent的經驗不足,有很多方法可以在這兩種行為中平衡,這邊我們主要談論最簡單的-greedy。
-greedy的概念非常簡單,我們的policy有
的機率會做隨機行為,
的機率做greedy action,這樣就能有
的機率去做exploration來學習環境。
-greedy是一種
-soft policy,
-soft policy指的是對於所有State與Action,都滿足
。
像是random policy也是一種-soft方法,普遍我們比較常用的還是
-greedy。
上面提到Prediction指的就是Policy Evaluation的部分,用來估計目前的值,
而Control就是指Policy Improvement的部分,用來更新policy。
直接看演算法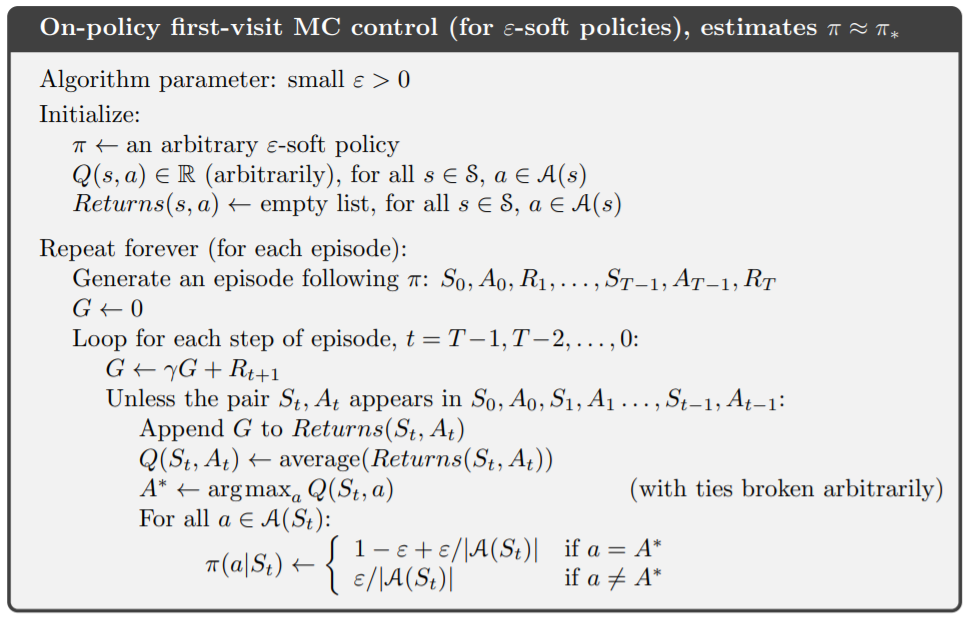
需要注意的是:
今天我們使用gym裡blackjack環境
- 不知道blackjack是甚麼的話可以看維基百科,簡單來講就是跟莊家比手牌中的大小,大的就獲勝,但手牌不能超過21點,而莊家在17點一下會持續抽牌
- gym環境中的blackjack不包含特殊規則,且假設抽牌後牌會放回牌堆中,所以同樣一張牌可能出現不只一次
在blackjack中,只有兩種action:繼續抽牌、停止;三種reward:贏為+1,輸為-1,平手為0。
我們用Monte Carlo Method來找找看最佳的Value Function與Policy
import gym
import numpy as np
import sys
from collections import defaultdict
env = gym.make('Blackjack-v0')
num_episodes = 500000
gamma = 1.0
epsilon = 0.2
returns_sum = defaultdict(float)
returns_count = defaultdict(float)
Q = defaultdict(lambda: np.zeros(env.action_space.n))
policy = defaultdict(lambda: np.ones(env.action_space.n) / env.action_space.n)
先初始化需要的變數,這裡將returns、Q與policy都設為defaultdict,可以讓我們不用一開始就初始化state大小的array,有時候我們並不知道state總共有多少,或是state太多避免浪費空間。
def first_visit_update(episode):
G = 0
used = set()
for idx, (state, action, reward) in enumerate(episode[::-1]):
G = gamma * G + reward
if (state, action) in used:
continue
returns_sum[(state, action)] += G
returns_count[(state, action)] += 1
Q[state][action] = returns_sum[(state, action)] / returns_count[(state, action)]
A_star = np.argmax(Q[state])
policy[state] = np.ones(env.action_space.n) * epsilon / env.action_space.n
policy[state][np.argmax(Q[state])] += 1 - epsilon
used.add((state, action))
定義first visit的update function,used用來判斷(state, action) pair是否visit過
def every_visit_update(episode):
G = 0
for idx, (state, action, reward) in enumerate(episode[::-1]):
G = gamma * G + reward
returns_sum[(state, action)] += G
returns_count[(state, action)] += 1
Q[state][action] = returns_sum[(state, action)] / returns_count[(state, action)]
A_star = np.argmax(Q[state])
policy[state] = np.ones(env.action_space.n) * epsilon / env.action_space.n
policy[state][np.argmax(Q[state])] += 1 - epsilon
也可以用every visit的方法來更新Value
for i in range(num_episodes):
state = env.reset()
episode = []
while True:
action = np.random.choice(np.arange(env.action_space.n), p = policy[state])
next_state, reward, done, info = env.step(action)
episode.append((state, action, reward))
if done:
break
state = next_state
first_visit_update(episode)
#every_visit_update(episode)
print(f'\repisode: {i + 1}/{num_episodes}', end = '')
sys.stdout.flush()
總共跑num_episodes次迴圈,每次迴圈先跟環境互動,並用一個list存放環境回傳的資訊。再用剛剛寫的update 更新Value
# evaluation
win = 0
for i in range(num_episodes):
state = env.reset()
while True:
action = np.argmax(policy[state])
next_state, reward, done, info = env.step(action)
if reward == 1:
win += 1
if done:
break
state = next_state
print(f'\nWin Rate: {win / num_episodes}')
最後可以用求出的policy來看看我們的Agent效果好不好,記得這裡使用的是greedy action,我們不希望評估效能的時候還要繼續exploration。
最後勝率大約在43%左右,而隨機策略的勝率約為37%~38%,提升了5~6%
可以參考udacity裡的plot function來看我們的policy與value
from plot_utils import *
plot_policy(dict((k, np.argmax(v)) for k, v in Q.items()))
plot_blackjack_values(dict((k, np.max(v)) for k, v in Q.items()))
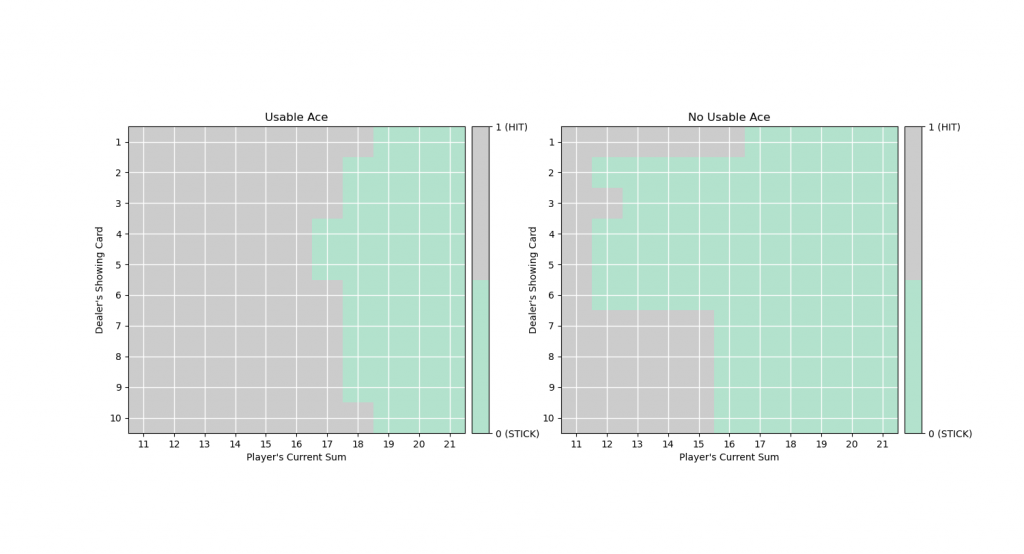
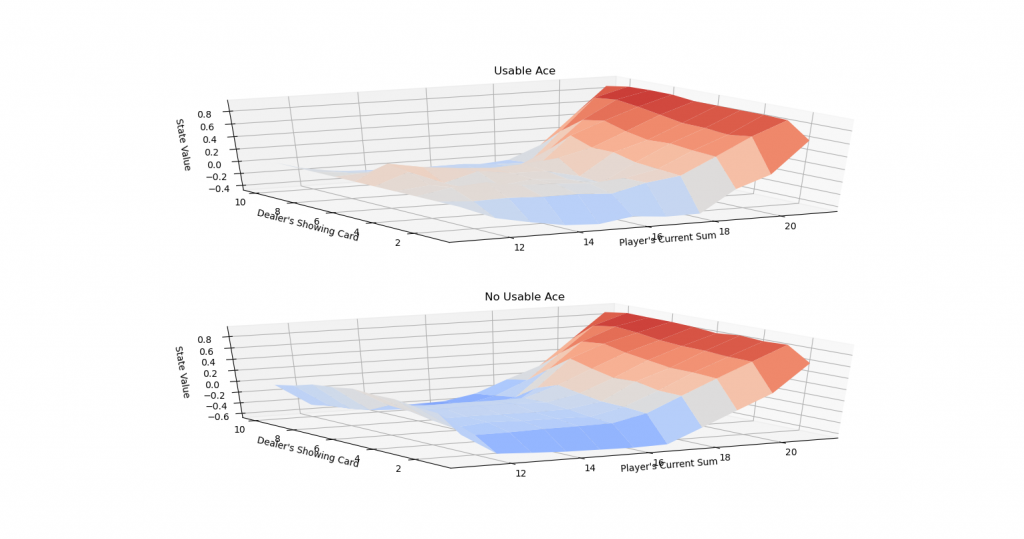
可以對照Sutton書中的optimal policy與對應的value: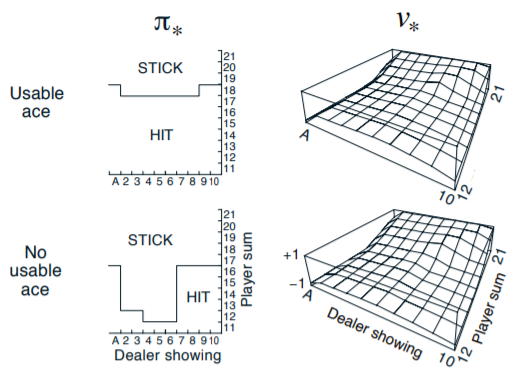
跟我們訓練出來得值差不多。
Monte Carlo Method還有很多地方可以優化,像是
我們可不可以不要用-greedy來達到Exploration and Exploitation的平衡呢?只要行為的policy與目標的policy分開就行了,明天將會介紹這種方法。

