對於仍未熟悉ROS 環境的同學,在進行實際的機器人操作前,總是希望能透過電腦模擬的方式,事先 run 過一遍自己編寫的程式碼,來降低機器人的失誤及開發成本。因此這次要介紹的便是三維物理模擬軟體 Gazebo 及其三維參數可視化軟體 Rviz 。
Gazebo 是一個三維物理模擬平台,它可以模擬現實世界中的各種物理行為,因此當我們手上沒有實驗環境,我們便可以透過於此來搭建模擬環境。剛開啟 gazebo 它是甚麼也沒有的,不過我們可以透過左邊 insert 的選項插入我們下載的 turtlebot 3 與不同的地圖物件。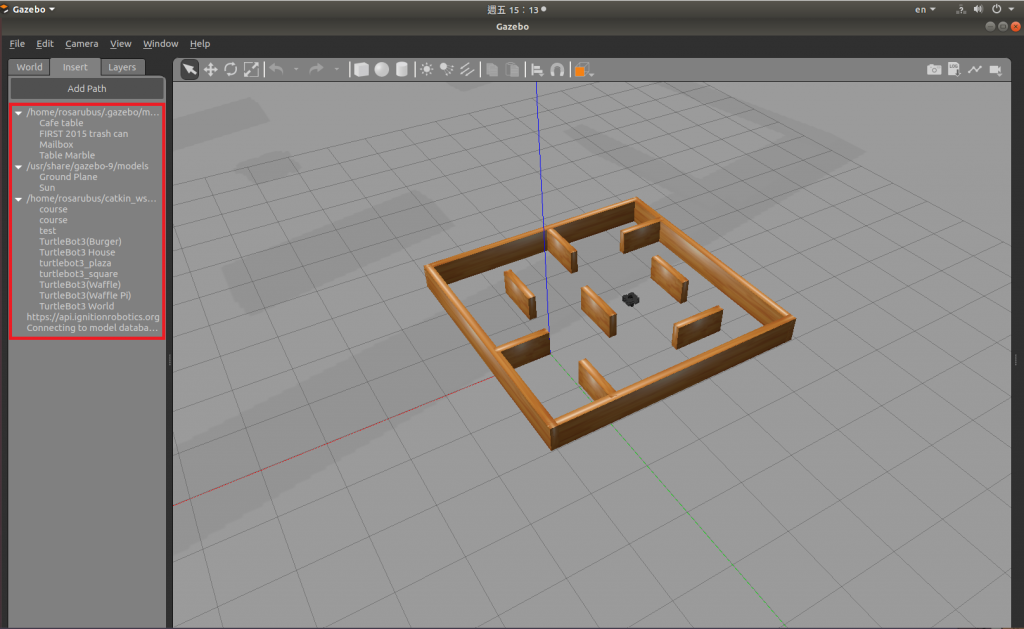
不過,要開啟 gazebo 除了直接開啟應用程式外,最常見的方式是透過 launch file 將 gazebo 和所需地圖物件一次性大量開啟。經過前幾天的教學,相信大家都應該相當熟練才是。
Rviz 是一個將三維參數可視化軟體。具體來說,它可以將機器人於 Gazebo 運行時所取的參數,具象化的呈現在我們眼前。透過於此,我們可以輕鬆獲得像是路徑、地圖的構建、又或是雷達掃描影像,都是托這個軟體的功勞。Rviz 有許多不同的外掛,這些外掛提供各式各樣的功能,上述所提到的路徑等資訊就是利用插件來取得,因此可以是個人所需來安裝不同的插件。但是其資訊及引數都必須由其他軟體提供。因此我們最主要的目的便是利用 gazebo 創造資料及引數,並使用 Rviz 來訂閱相關主題,並完成視覺化的渲染,讓開發者更容易理解資料的意義。
若是各位已經按照上面提供的教學連結,都安裝完了 SLAM 系統及 Turtlebot3 的話,接下來我們開啟另外一個終端機,並執行以下程序:

我們便可以透過呼叫 Rviz 中的 SLAM 外掛模擬機器人進行地圖構建的畫面,同時,我們可以發現Rviz的畫面與Gazebo是相互對應的。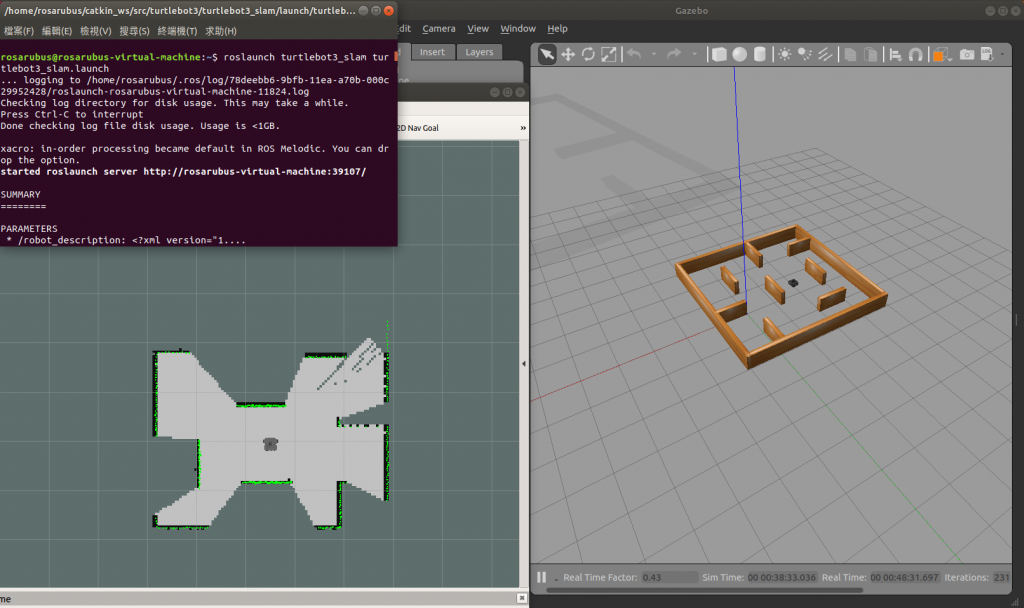
往後還會有許多功能會介紹,且基本上都是圍繞著這兩個軟體跑不掉,在這篇就先不多做贅述了。
今天先大致介紹 Gazebo 與 Rviz 這兩個軟體的功能。這兩個軟體對於 ROS 虛擬環境分析有舉足輕重的地位,現今各式各樣的機器人可說是都在這兩個軟體中成長茁壯的。明天會教大家如何在 Gazebo 中如何插入屬於自己的環境模型,就請大家敬請期待!!

