接下來要介紹的是 flow-based model 的數學原理,今天首先會需要介紹到相關的數學概念與定理
關於 flow-based model 的原理,我也還正在理解中,如果有解釋得不對的地方,請不吝指正
由於接下來要介紹的 flow-based model 的原理會使用到幾個線性代數或微積分的概念,所以在此會先簡介一下~但如果本來就不熟悉線性代數和微積分的話,這一段可能會有點辛苦,可以先記得它們代表的意義就好(這些東西我也快忘光啦
當有一個函數 f(x) 會將輸入的 x 向量投射到另外一個空間的向量,這個函數對 x 的所有偏微分組成的矩陣,就是 Jacobian matrix,它的形式如下:
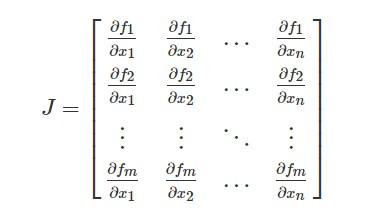
而 Jacobian matrix 常被用於座標轉換。
Determinant 是一個純量,每個方形的矩陣(行和列數相等的矩陣)可以特定計算方法得出,我們可以透過 determinant 掌握一些矩陣的性質,例如矩陣是否可逆,以及矩陣變換對體積的影響。
一個矩陣 A 的 determinant 會被記作 det A,而計算方式會是方形矩陣的元素依照特定規則計算乘積再加總起來,對於 2x2、3x3 的矩陣來說,非常容易取得 determinant 的計算公式,不過如果是高維的矩陣,可能就需要使用拉普拉斯展開(Laplace expansion)計算。
由於在理解 flow-based model 原理時,不一定要知道 determinant 的計算方式,因此這裡就略過。
除此之外,determinant 可以看作向量在空間中展開的「體積」,這個概念對於生成模型將 code 空間的分布投射到影像空間分布很重要。
Change of Variable Theorem 是微積分中的一個重要定理,它提供了一種方法,用於計算積分中的變數變換後的積分,能用來簡化並處理複雜的積分。
首先直接套用生成任務的例子,但先以一維積分為例。假設影像的分布為 p(x),code 的分布為 π(z),由於機率分布的積分都為 1,因此可以寫下以下的等式: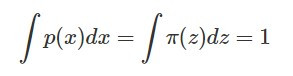
整理之後得到下式: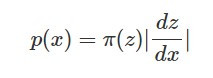
我們可以透過一個 generator G(z) 將 z 轉換為 x,因此 x = G(z),而根據 flow-based model 的要求,G(z) 必須是可逆的,因此將影像投影到 code 的 encoder 就是 G(z) 的反函數 G^-1(x),將 z = G^-1(x) 帶入上式就可以得到:
推廣到高維的情況則是如下列的形式:
這就是在只使用一個 generator 的情況下,我們可以怎麼找到影像分布 p(x)~然而 flow-based model 是由一系列的 generator 所構成,明天將會討論這部分的數學

