
離散傅立葉轉換(Discrete Fourier Transform,簡稱DFT)是一種信號處理技術,用於將時域(或空間域)中的離散數據序列轉換成頻域中的頻譜表示。DFT可視為將信號分解為不同頻率成分的過程。它在許多領域中都有廣泛的應用,包括影像處理、音訊處理、通信、數據壓縮等。
我們之前的主題都集中在空間域中進行核函數的摺積,並分析這種在空間域中的摺積效果。然而,使用核函數對影像進行空間域摺積是一個相對較慢的過程,而轉向頻域處理則可以使運算效率更高,且可以透過頻譜分析影像的特性。
一維的離散傅立葉轉換數學定義如下:
其中:
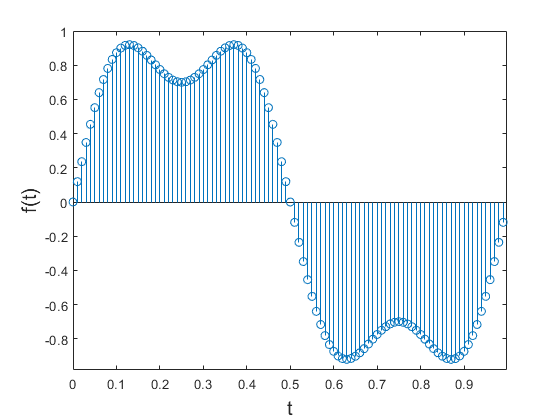
舉個例子,假設有一個**f(t)**函數,包含了兩個頻率的正弦波1Hz和3Hz,其函數為:
我們可以看到這個函數在時域上的波形。
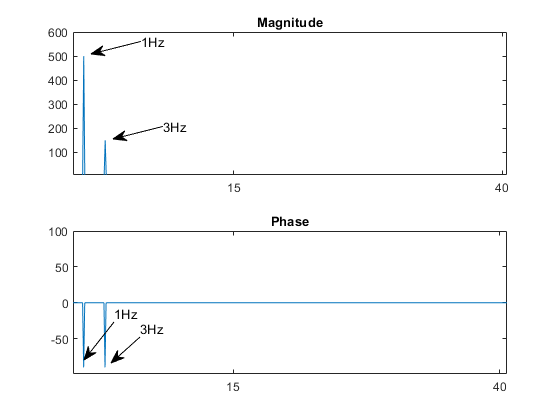
接著我們對這個函數做傅立葉轉換,可以得到下圖在1Hz和3Hz出現脈衝,這代表這個函數是由一個振幅較大的1Hz正弦波以及振幅較小的3Hz正弦波組成。正好驗證了我們上面函數的特性。藉此,我們可以透過DFT分析離散訊號在頻域上的特性。
由於我們的圖片是離散的二維訊號f(x,y),無法使用上述的公式做轉換。因此,我們需要使用二維的離散傅立葉轉換,對影像做DFT。
二維的離散傅立葉轉換數學定義如下:
其中:
傅立葉轉換通常要求輸入的長、寬是2、3、5的次方。這樣的數字可以讓 DFT 的效率更高。使用 cv::getOptimalDFTSize()可以獲得取得最佳化長、寬大小。並使用cv::copyMakeBorder將輸入影像的邊界向外延伸,延伸的深度即為最佳化大小減去原影像大小。
cv::Mat padded;
// 將輸入影像擴展至最佳大小
int n = cv::getOptimalDFTSize(I.rows);
int m = cv::getOptimalDFTSize(I.cols);
// 在邊界上添加零值,以確保影像大小為偶數
copyMakeBorder(I, padded, 0, n - I.rows, 0, m - I.cols, cv::BORDER_CONSTANT, cv::Scalar::all(0));
將延伸過後的輸入影像和一個大小相同且元素全為0的矩陣合併成一個雙通道的影像。並使用cv::dft()對這張影像做傅立葉,要注意輸入的影像必須是CV_32F、CV_64F。
// 將影像轉換為複數格式,用於DFT計算
cv::Mat input_channels[] = {cv::Mat_<float>(padded), cv::Mat::zeros(padded.size(), CV_32F)};
cv::Mat input;
cv::merge(input_channels, 2, input); // 將兩個平面合併成一個複數影像
// 執行離散傅立葉變換(DFT)
cv::Mat complexI;
cv::dft(input, complexI);
由於傅立葉係數的動態範圍太大,無法顯示。造成高值全部顯示為白點,而低值全部顯示為黑點。如果要使用灰階圖顯示頻譜,必須將線性標度轉換為對數標度,其數學公式如下:

// 分離複數影像的實部和虛部
cv::split(complexI, dft_result);
//使用實部和虛部計算大小
cv::magnitude(dft_result[0], dft_result[1], magnitude);
cv::Mat magI = magnitude + cv::Scalar::all(1);
cv::log(magI, magI);
cv::magnitude():對頻譜的實數、虛數部分取歐氏距離。cv::log():對影像的每一個元素取對數。
接下來將第一步擴展的影像裁切掉。為了讓頻譜可視化,我們可以重新排列結果的象限,以便原點(0,0)與影像中心相對應。
// 裁剪頻譜以適應偶數大小
magI = magI(cv::Rect(0, 0, magI.cols & -2, magI.rows & -2));
// 重新排列傅立葉變換的象限,使原點位於影像中心
int cx = magI.cols / 2;
int cy = magI.rows / 2;
cv::Mat q0(magI, cv::Rect(0, 0, cx, cy)); // 左上 - 建立象限區域
cv::Mat q1(magI, cv::Rect(cx, 0, cx, cy)); // 右上
cv::Mat q2(magI, cv::Rect(0, cy, cx, cy)); // 左下
cv::Mat q3(magI, cv::Rect(cx, cy, cx, cy)); // 右下
cv::Mat tmp; // 交換象限(左上和右下)
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp); // 交換象限(右上和左下)
q2.copyTo(q1);
tmp.copyTo(q2);
#include <iostream>
#include "opencv2/opencv.hpp"
#include "opencv2/core/utils/logger.hpp"
using namespace std;
int main()
{
// 設定 OpenCV 日誌等級為 SILENT,以抑制除錯訊息
cv::utils::logging::setLogLevel(cv::utils::logging::LOG_LEVEL_SILENT);
// 讀取灰階影像 Lenna.png,如果無法讀取則輸出錯誤並退出
cv::Mat I = cv::imread("C:\\Users\\vince\\Downloads\\Lenna.png", cv::IMREAD_GRAYSCALE);
if (I.empty()) {
cout << "Error opening image" << endl;
return EXIT_FAILURE;
}
cv::Mat padded;
// 將輸入影像擴展至最佳大小
int n = cv::getOptimalDFTSize(I.rows);
int m = cv::getOptimalDFTSize(I.cols);
// 在邊界上添加零值,以確保影像大小為偶數
copyMakeBorder(I, padded, 0, n - I.rows, 0, m - I.cols, cv::BORDER_CONSTANT, cv::Scalar::all(0));
// 將影像轉換為複數格式,用於DFT計算
cv::Mat input_channels[] = {cv::Mat_<float>(padded), cv::Mat::zeros(padded.size(), CV_32F)};
cv::Mat input;
cv::merge(input_channels, 2, input); // 將兩個平面合併成一個複數影像
// 執行離散傅立葉變換(DFT)
cv::Mat complexI;
cv::dft(input, complexI);
// 計算傅立葉變換的振幅,並轉換為對數尺度
cv::Mat dft_result[2];
cv::Mat magnitude;
// 分離複數影像的實部和虛部
cv::split(complexI, dft_result);
//使用實部和虛部計算大小
cv::magnitude(dft_result[0], dft_result[1], magnitude);
// 轉換為對數尺度
cv::Mat magI = magnitude + cv::Scalar::all(1);
cv::log(magI, magI);
// 裁剪頻譜以適應偶數大小
magI = magI(cv::Rect(0, 0, magI.cols & -2, magI.rows & -2));
// 重新排列傅立葉變換的象限,使原點位於影像中心
int cx = magI.cols / 2;
int cy = magI.rows / 2;
cv::Mat q0(magI, cv::Rect(0, 0, cx, cy)); // 左上 - 建立象限區域
cv::Mat q1(magI, cv::Rect(cx, 0, cx, cy)); // 右上
cv::Mat q2(magI, cv::Rect(0, cy, cx, cy)); // 左下
cv::Mat q3(magI, cv::Rect(cx, cy, cx, cy)); // 右下
cv::Mat tmp; // 交換象限(左上和右下)
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp); // 交換象限(右上和左下)
q2.copyTo(q1);
tmp.copyTo(q2);
// 正規化至 [0, 1]
normalize(magI, magI, 0, 1, cv::NORM_MINMAX);
// 顯示原始灰階影像
cv::imshow("Input Image", I);
// 如果輸入影像為浮點數,影像會自動乘以 255 並顯示
cv::imshow("Spectrum Magnitude", magI);
cv::waitKey();
return EXIT_SUCCESS;
}
經過離散傅立葉轉換後,我可以得到下圖的結果,右邊即為影像f(x,y)的頻譜。

