第 11 屆 iThome 鐵人賽
分享至
動力系統模型是最普遍應用的動態模型,透過微分方程來描述力的變化。在這會介紹兩種動力系統,連續型與離散型,兩者的差異僅為與。因此,這兩種系統的特性大致上是相同的,只不過離散型的系統因微分的緣故會存在時間的遲滯,遲滯的時間為。
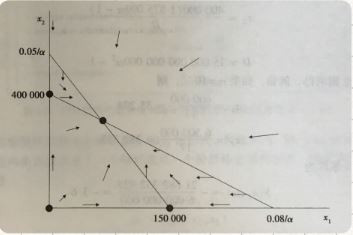
討論藍鯨與長鬚鯨的生存競爭,藍鯨的增長率為每年5%,長鬚鯨為每年8%。環境可以支持的鯨魚最大數量估計為藍鯨150000條,長鬚鯨為400000條,在過去100年的肆意捕撈使鯨魚數量減少,藍鯨約為5000條,長鬚鯨約為70000條,試問藍鯨是否會滅絕。
IT邦幫忙


 iThome鐵人賽
iThome鐵人賽