第 11 屆 iThome 鐵人賽
分享至
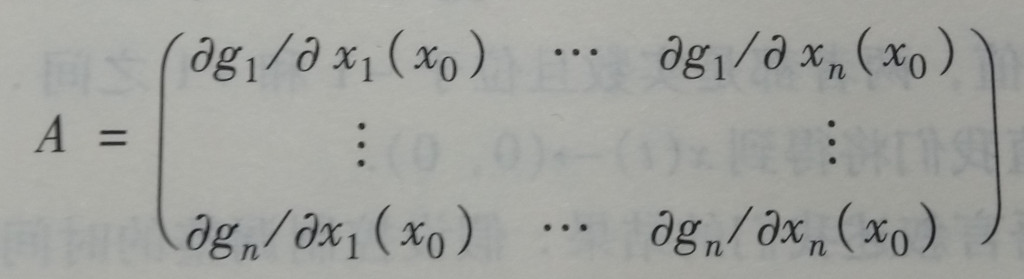
繼續來介紹如何處理離散動力系統,主要的概念還是透過線性逼近,並結合特徵值算法。
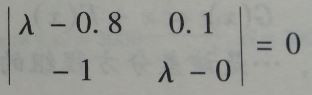
這邊我們重新考慮第18天的例子,
假設需要5分鐘進行控制調整,外加10分鐘從其他工作切換到觀察速度指示器。在這些條件下調整速度的策略會成功嗎。
IT邦幫忙


 iThome鐵人賽
iThome鐵人賽