寫到Day15只有一個感想:恩...我的文章怎麼寫得越來越長 
其實這次鐵人賽的每一篇都差不多是我一個晚上下班後寫的量,原本覺得還好,但文章打起來怎麼落落長,而且寫文章的時間還比寫程式的時間多太多了 囧
但我們今天還是要稍微提到一下坐標轉換的部分,相信大家已經開始對坐標系統感到厭煩了,已經是最後一篇了最後!!
在 Day 13 時我們提到 TWD67 無法靠橢球參數轉換到WGS84或TWD97,因此要使用控制點來進行兩者之間的轉換,也就是今天主要要說明的內容。
採用間接觀測平差進行線性方程式求解
一組坐標可列兩條觀測方程式,假設有m條方程式、n個未知數,且觀測量之間獨立,可將公式列為: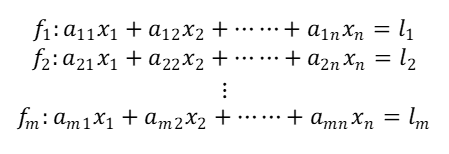
由於方程式數量m遠大於未知數數量n,以這種情形會無法有唯一解產生,而要如何得到最佳解呢?
我們給予每條觀測量一個改正數v,當改正數的平方和為最小時,即可求得最佳解。
整理成矩陣形式則為: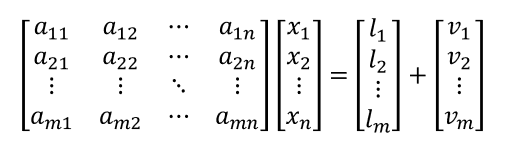
又可寫成:
在這邊就不推導了,不然會太理論大家都看不下去,而且平差就算給整個學期的課也都學不完的 ~
直接講結論,用以下公式求得未知數矩陣 X 的最佳解: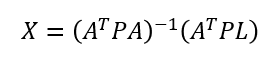
( P 為觀測方程式的權矩陣,大小為mxm的對角矩陣,若權重相同則使用單位矩陣)
因此,只要把觀測方程式整理成上述那種矩陣的形式,即可使用這個式子去求得轉換參數,求出轉換參數後,即可用這組參數代回去轉其他的坐標,達到批次坐標轉換的目的,接下來我們來看4參數和6參數的公式。
4個參數:包含一個比例尺因子S、一個旋轉量theta及兩個平移量∆x、∆y。
其物理意義為轉換後原為正方形之特徵物仍保持正方形狀,一般用於兩平面直角坐標系統之坐標轉換。
一組坐標可列兩條觀測方程式,4個未知數至少需要4條方程式才能求解,因此至少要2組控制點才可求得唯一解。
由於原始公式為非線性,以a、b、Tx、Ty這四個參數代之,進行線性求解
注意!!!最後求解出來的參數非上述所列的4個參數的意義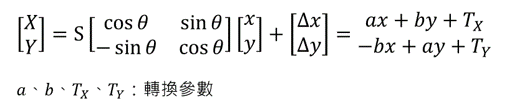
using MathNet.Numerics.LinearAlgebra;
using Newtonsoft.Json;
using System;
using System.Collections.Generic;
using System.Web.Script.Serialization;
using System.Web.Script.Services;
using System.Web.Services;
public class POINT
{
public double x;
public double y;
}
public class ConformalOutput
{
public string equ_X;
public string equ_Y;
public double a;
public double b;
public double Tx;
public double Ty;
public double Sigma0;
public List<POINT> Converted;
}
/// <summary>
/// TransService 的摘要描述
/// </summary>
[WebService(Namespace = "http://tempuri.org/")]
[WebServiceBinding(ConformsTo = WsiProfiles.BasicProfile1_1)]
// 若要允許使用 ASP.NET AJAX 從指令碼呼叫此 Web 服務,請取消註解下列一行。
[System.Web.Script.Services.ScriptService]
public class TransService : System.Web.Services.WebService
{
[WebMethod(EnableSession = true)]
[ScriptMethod(ResponseFormat = ResponseFormat.Json)]
public string ConformalTrans(string ori_point, string control_point, string unconvert_point)
{
List<POINT> OriPointList = JsonConvert.DeserializeObject<List<POINT>>(ori_point);
List<POINT> ControlPointList = JsonConvert.DeserializeObject<List<POINT>>(control_point);
List<POINT> UnconvertPointList = JsonConvert.DeserializeObject<List<POINT>>(unconvert_point);
if(OriPointList.Count != ControlPointList.Count || ControlPointList.Count < 2)
{
Context.Response.Status = "500 Invalid point number";
Context.Response.StatusCode = 500;
Context.ApplicationInstance.CompleteRequest();
return null;
}
else
{
var M = Matrix<double>.Build;
var A = M.Dense(OriPointList.Count * 2, 4);
var L = M.Dense(ControlPointList.Count * 2, 1);
var P = M.DenseDiagonal(OriPointList.Count * 2, OriPointList.Count * 2, 1);
for (int i = 0; i < OriPointList.Count; i++)
{
A[i * 2, 0] = OriPointList[i].x;
A[i * 2, 1] = OriPointList[i].y;
A[i * 2, 2] = 1;
A[i * 2 + 1, 0] = OriPointList[i].y;
A[i * 2 + 1, 1] = -OriPointList[i].x;
A[i * 2 + 1, 3] = 1;
L[i * 2, 0] = ControlPointList[i].x;
L[i * 2 + 1, 0] = ControlPointList[i].y;
}
var dX = (A.Transpose() * P * A).Inverse() * (A.Transpose() * P * L);
var V = A * dX - L;
var Sigma0 = Math.Sqrt((V.Transpose() * P * V)[0, 0] / (OriPointList.Count * 2 - 4));
var output = new ConformalOutput()
{
equ_X = "X = a*x + b*y + Tx",
equ_Y = "Y = -b*x + a*y + Ty",
a = dX[0, 0],
b = dX[1, 0],
Tx = dX[2, 0],
Ty = dX[3, 0],
Sigma0 = Sigma0,
Converted = new List<POINT>()
};
if (UnconvertPointList != null)
{
List<POINT> arrList = new List<POINT>();
for (int j = 0; j < UnconvertPointList.Count; j++)
{
arrList.Add(new POINT()
{
x = output.a * UnconvertPointList[j].x + output.b * UnconvertPointList[j].y + output.Tx,
y = output.a * UnconvertPointList[j].y - output.b * UnconvertPointList[j].x + output.Ty
});
}
output.Converted = arrList;
}
return new JavaScriptSerializer().Serialize(output);
}
}
}
6個參數:兩坐標系間包含二個比例尺因子Sx、Sy、一個變形因子(坐標系兩軸間之非正交)epsilon、一個旋轉量theta及兩個平移量∆x、∆y。
一組坐標可列兩條觀測方程式,6個未知數至少需要6條方程式才能求解,換句話說:至少要三個共同點來求解,基本上大多數的坐標轉換均能以 a1, a2, b1, b2, Tx, Ty 此6個參數為之。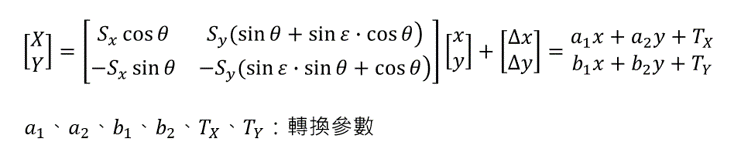
public class AffineOutput
{
public string equ_X;
public string equ_Y;
public double a1;
public double a2;
public double b1;
public double b2;
public double Tx;
public double Ty;
public double Sigma0;
public List<POINT> Converted;
}
[WebMethod(EnableSession = true)]
[ScriptMethod(ResponseFormat = ResponseFormat.Json)]
public string AffineTrans(string ori_point, string control_point, string unconvert_point) {
List < POINT > OriPointList = JsonConvert.DeserializeObject < List < POINT >> (ori_point);
List < POINT > ControlPointList = JsonConvert.DeserializeObject < List < POINT >> (control_point);
List < POINT > UnconvertPointList = JsonConvert.DeserializeObject < List < POINT >> (unconvert_point);
if (OriPointList.Count != ControlPointList.Count || ControlPointList.Count < 2) {
Context.Response.Status = "500 Invalid point number";
Context.Response.StatusCode = 500;
Context.ApplicationInstance.CompleteRequest();
return null;
} else {
var M = Matrix < double > .Build;
var A = M.Dense(OriPointList.Count * 2, 6);
var L = M.Dense(ControlPointList.Count * 2, 1);
var P = M.DenseDiagonal(OriPointList.Count * 2, OriPointList.Count * 2, 1);
for (int i = 0; i < OriPointList.Count; i++) {
A[i * 2, 0] = 1;
A[i * 2, 1] = OriPointList[i].x;
A[i * 2, 2] = OriPointList[i].y;
A[i * 2 + 1, 3] = 1;
A[i * 2 + 1, 4] = OriPointList[i].x;
A[i * 2 + 1, 5] = OriPointList[i].y;
L[i * 2, 0] = ControlPointList[i].x;
L[i * 2 + 1, 0] = ControlPointList[i].y;
}
var dX = (A.Transpose() * P * A).Inverse() * (A.Transpose() * P * L);
var V = A * dX - L;
var Sigma0 = Math.Sqrt((V.Transpose() * P * V)[0, 0] / (OriPointList.Count * 2 - 6));
var output = new AffineOutput() {
equ_X = "X = a1*x + a2*y + Tx",
equ_Y = "Y = b1*x + b2*y + Ty",
a1 = dX[1, 0],
a2 = dX[2, 0],
Tx = dX[0, 0],
b1 = dX[4, 0],
b2 = dX[5, 0],
Ty = dX[3, 0],
Sigma0 = Sigma0,
Converted = new List < POINT > ()
};
if (UnconvertPointList != null) {
List < POINT > arrList = new List < POINT > ();
for (int j = 0; j < UnconvertPointList.Count; j++) {
arrList.Add(new POINT() {
x = output.a1 * UnconvertPointList[j].x + output.a2 * UnconvertPointList[j].y + output.Tx,
y = output.b1 * UnconvertPointList[j].x + output.b2 * UnconvertPointList[j].y + output.Ty
});
}
output.Converted = arrList;
}
return new JavaScriptSerializer().Serialize(output);
}
}
接著我們給予一組數據進行轉換參數的測試,依照WS的Input分別建立以下三個list:
OriPointList:控制點的原始坐標值ControlPointList:控制點轉換後的坐標值UnconvertPointList:待轉換的坐標var OriPointList = [
{x: 5297.08, y: -5277.02},
{x: 5288.72, y: -257.99},
{x: 109.53, y: -278.9},
{x: 121.56, y: -5292.9}
]
var ControlPointList = [
{x: 106.057, y: 105.967},
{x: -106.056, y: 106.039},
{x: -105.953, y: -106.041},
{x: 105.948, y: -105.963}
]
var UnconvertPointList = [
{x: 1010.660,y: -3025.660},
{x: 657.820,y: -2856.550},
{x: 1264.430,y: -738.400},
{x: 4328.460,y: -2684.230},
{x: 2511.780,y: -4541.090}
]
測試呼叫Conformal的轉換WS,輸入上述三個參數,回傳得到轉換參數、單位權中誤差與轉換後的點位坐標值。
$.ajax({
type: "POST",
url: "WS/TransService.asmx/ConformalTrans",
data: JSON.stringify({
ori_point: JSON.stringify(OriPointList),
control_point: JSON.stringify(ControlPointList),
unconvert_point: JSON.stringify(UnconvertPointList)
}),
dataType: "json",
contentType: "application/json; charset=utf-8",
success: function (d) {
var data = $.parseJSON(d.d);
console.log(data)
}});
以下針對回傳的數據進行解釋:
Converted:為UnconvertPointList進行坐標轉換後的點位值。Sigma0:為求解轉換參數時,平差解算的單位權中誤差。a, b, Tx, Ty:4個轉換參數。equ_X, equ_Y:所採用的轉換公式。為什麼要列出轉換公式?
前面有提到,最後求解出來的轉換參數的意義已不再是當初的平移放大旋轉的值,而只是一個線性化後的係數代碼,因此該參數與轉換公式有很密切的關係,轉換公式不同,解算出來的4個轉換參數的值亦不相同。
OutputData_Conformal = {
Converted: [
{x: 10.154139710099585, y: -70.45379595719831},
{x: 3.080699810822992, y: -85.10660242178916},
{x: -84.92989098747529, y: -59.63422218644743},
{x: -3.6569389669741525, y: 67.55372688020557},
{x: 73.34700574534337, y: -8.207839181362402}
],
Sigma0: 2.3688869100503234,
Tx: -115.78306345448844,
Ty: -112.12827062849865,
a: 0.00011663685563432687,
b: -0.04158409172216067,
equ_X: "X = a*x + b*y + Tx",
equ_Y: "Y = -b*x + a*y + Ty"
}
今天的內容比較難,因此讀起來會比較吃力些,但我在本篇文章也沒有提到很多的理論內容。
測量平差的內容非常多,也能應用到許多地方,例如統計回歸、參數擬合也都是平差的範疇,其解算的方法大致上可分為:直接觀測平差、間接觀測平差、廣義平差、虛擬觀測平差、序列式平差、帶有條件約制的平差等,若有興趣可以找相關文章閱讀,在此就不贅述了,不然大家就真的看不下去了。
坐標的相關文章到此結束,明天開始我們要介接一些實務上會用到的API、建立功能模組進行查詢,就以即時水位站和水位警戒值開始吧!

