這篇教學會使用 MediaPipe 的物體偵測模型 ( Objectron ) 偵測特定的物體,再透過 OpenCV 讀取攝影鏡頭影像進行辨識,使用 3D 的立方體形狀匡出偵測到的物體。
因為程式使用 Jupyter 搭配 Tensorflow 進行開發,所以請先閱讀「使用 Anaconda」和「使用 MediaPipe」,安裝對應的套件,如果不要使用 Juputer,也可參考「使用 Python 虛擬環境」,建立虛擬環境進行實作。
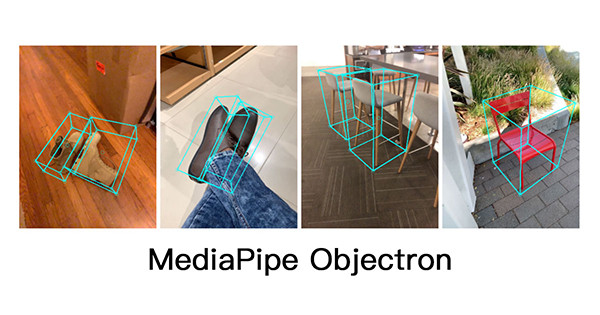
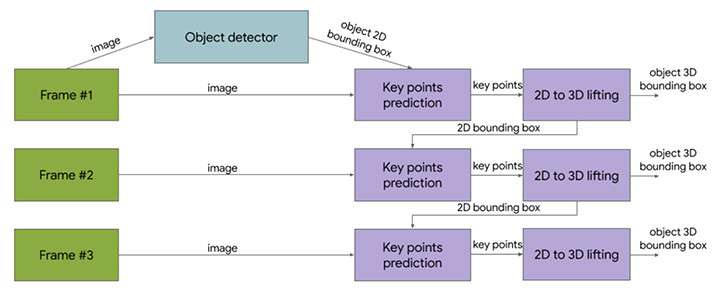
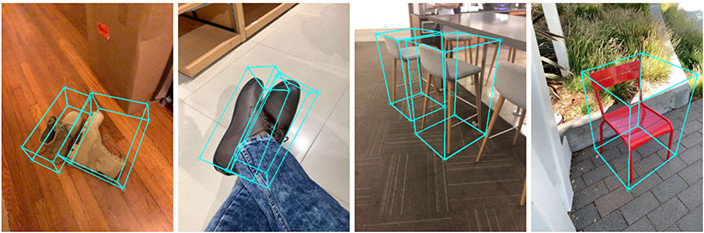
Mediapipe Objectron 模型可以透過 3D 立方體標記偵測到的「特定物體」,並進一步標記出所偵測到物體的 3D 大小,3D 空間並非真正的立體空間,而是透過「2D 邊界」搭配「深度學習」所計算得出 ( 圖片來源 )。
目前 Mediapipe Objectron 可以偵測 Cup ( 馬克杯 )、Shoe ( 鞋子 )、Camera ( 單眼相機 ) 和 Chair ( 椅子 ) 四種物體,未來會陸續提供更多可偵測的物體 ( 詳細參考:Objectron Dataset )
下方的程式碼延伸「讀取並播放影片」文章的範例,搭配 mediapipe 物體偵測的方法,透過攝影鏡頭獲取影像後,即時標記出腳上穿的鞋子。
import cv2
import mediapipe as mp
mp_drawing = mp.solutions.drawing_utils # mediapipe 繪圖方法
mp_objectron = mp.solutions.objectron # mediapipe 物體偵測
cap = cv2.VideoCapture(0)
# 啟用物體偵測,偵測鞋子 Shoe
with mp_objectron.Objectron(static_image_mode=False,
max_num_objects=5,
min_detection_confidence=0.5,
min_tracking_confidence=0.99,
model_name='Shoe') as objectron:
if not cap.isOpened():
print("Cannot open camera")
exit()
while True:
ret, img = cap.read()
if not ret:
print("Cannot receive frame")
break
img = cv2.resize(img,(520,300)) # 縮小尺寸,加快演算速度
img2 = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 將 BGR 轉換成 RGB
results = objectron.process(img2) # 取得物體偵測結果
# 標記所偵測到的物體
if results.detected_objects:
for detected_object in results.detected_objects:
mp_drawing.draw_landmarks(
img, detected_object.landmarks_2d, mp_objectron.BOX_CONNECTIONS)
mp_drawing.draw_axis(img, detected_object.rotation,
detected_object.translation)
cv2.imshow('oxxostudio', img)
if cv2.waitKey(5) == ord('q'):
break # 按下 q 鍵停止
cap.release()
cv2.destroyAllWindows()
大家好,我是 OXXO,是個即將邁入中年的斜槓青年,我已經寫了超過 400 篇 Python 的教學,有興趣可以參考下方連結呦~ ^_^

