使用Unity做為我們的虛擬環境最主要的原因是因為容易上手與免費的特性,Unity個人版是免費的,可以在官網下載。
透過以下這個unity的專案,我們可以取得一個範例,知道如何在unity中的虛擬環境,讓車子在ros based的環境下做SLAM。

影片中是透過VPN+TCP+UDP的方式,讓雲端的服務協助SLAM運算,將結果同步到地端的unity環境中。這個部份搭配之前所提到的kubernetes multi-cni多網卡&vpn設定與應用。
也是藉由以上這個專案為基礎,我們開始製作自己的大車模型(FRC):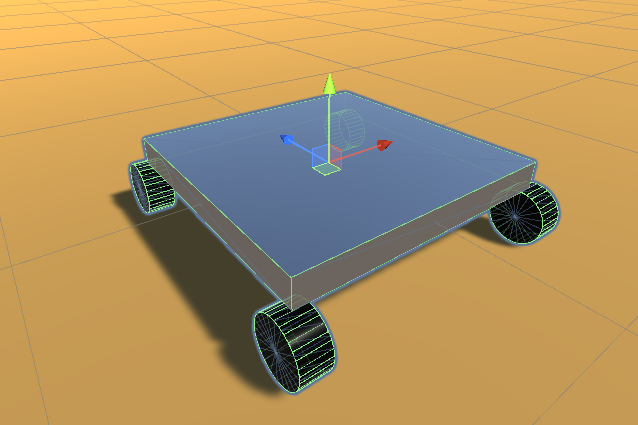
(成大學生品奕提供)
這台模擬大車的感測器(sensor)包含:
因為有4個輪子,分別都有上述所說的速度跟朝向的馬達,所以共8個馬達。
(成大學生嘉軒提供)
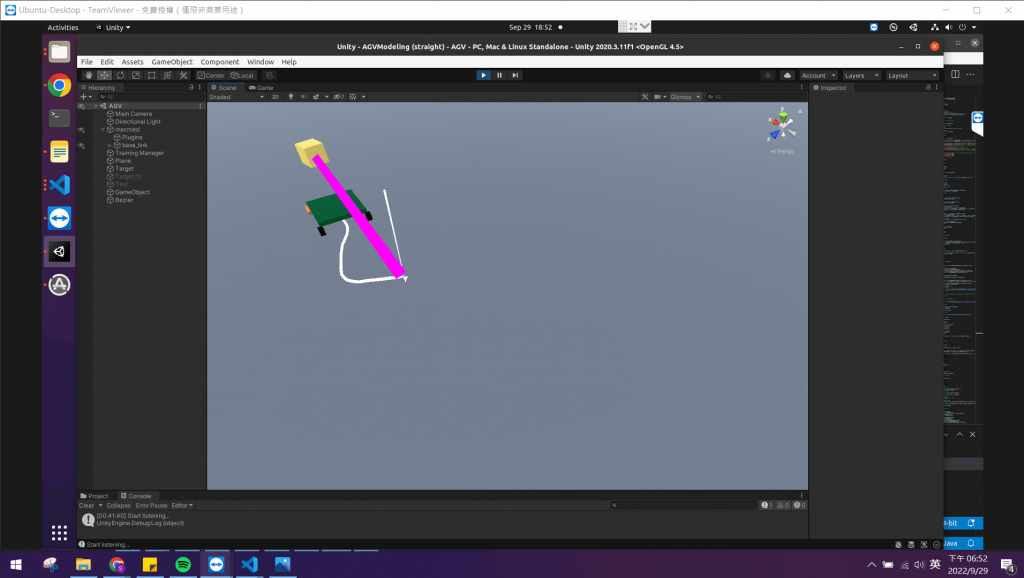
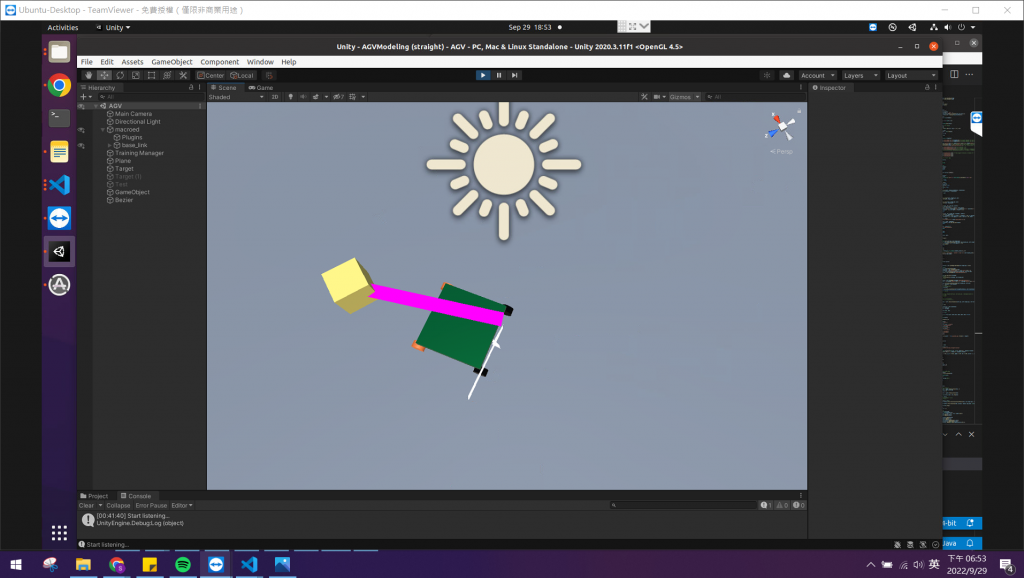
在Unity中透過這些sensor參數上的設定,可以操作車子往一個方向前進;黃色是目標,粉紅色是希望車子走的軌跡;用以確認sensor的正確性。