邊緣檢測就像是影像處理中的「找輪廓」技術,類似於用筆劃描繪物體外形的概念。這個方法在很多情況下都非常有用,它可以幫助我們找出物體的邊界,進而瞭解物體的形狀和輪廓。
這項技術在許多實際應用中發揮著重要作用,就像下圖所示。例如,當我們希望讓電腦能夠「看見」照片中的拼圖時,邊緣檢測能夠協助電腦識別出拼圖的外形。同樣地,這項技術在醫學影像分析、行人或車輛識別等情境中也扮演著關鍵的角色。
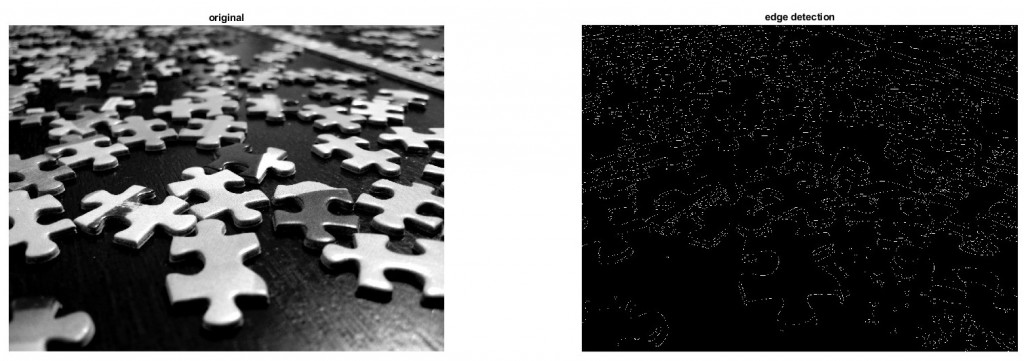
攝影師:Pixabay: https://www.pexels.com/zh-tw/photo/269399/
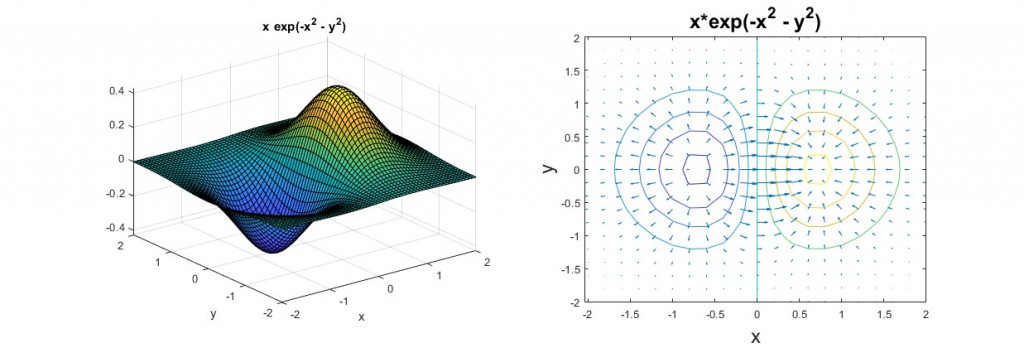
在數學和物理學領域,「梯度」是一個重要的概念,它用來描繪變化率和方向之間的關係。梯度是一個向量,可以提供函數在不同方向上變化的速率(斜率)和趨勢。這個概念在多個學科中均有廣泛應用,在影像處理中,梯度可以用來檢測影像的明暗變化率,相當於做一階微分,變化越強的位置越有可能是邊緣。下圖是一個函數f(x,y)3D圖和f(x,y)的梯度圖,可以看到箭頭的大小和方向就代表了這個函數f(x,y)變化的強度和趨勢。
假設你要求出f(x,y)的梯度,數學是可以表示為:

其中,X和Y的偏微分可以表示為: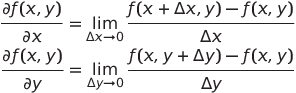
可以看到,其實梯度做的就是分別對f(x,y)做x、y的偏微分並加上單位向量i、j,也就是求出f(x,y)的斜率。
想像你正在爬一座山谷,而你目前處在左邊x為0.7的谷底,而你所在的位置可以用一個高度函數f(x,y)來表示,這個函數會告訴你在不同x、y位置的海拔高度。現在,你想找到一條最快的路徑,從山谷爬到山頂,而梯度就是你在這個情況下的指南針。
梯度告訴你在哪個方向上上升得最快,或者說在哪個方向上海拔增加最快。如果你想迅速爬上山頂,你會選擇朝著梯度最大(也就是箭頭最長)的方向前進,因為這是上升最快的方向。這個梯度方向就是你要找的最快路徑,而梯度的大小則表示了爬升的速度。
「邊緣」指的是影像中強度或顏色突然劇變的地方,通常這些地方代表著物體或結構的界限。這些邊緣是影像中值得關注的區域,因為它們反映了物體之間的分界,進一步協助我們進行物體辨識、分割以及其他相關的電腦視覺應用。
下圖是一張黑白相接圖。假設我們將y座標設為0,並將相鄰的點的灰階值分別表示為f(x,0)、f(x+1,0)和f(x-1,0)。可以注意到,f(x,0) 就是這張影像的邊緣,因為f(x-1,0) 的灰階值為0,而f(x+1,0) 的灰階值為255,兩者之間具有極大的灰階值差異。這種劇變提示著可能存在物體的邊界,這是邊緣檢測的基本觀念。
在邊緣檢測中,「梯度」被用來表示影像中強度變化的情況。劇烈的變化通常隱含著物體的邊緣或輪廓。我們通常會在影像的每個像素位置計算梯度,以瞭解影像不同區域的變化。
邊緣檢測的核心概念是計算影像f(x,y)在不同方向上的梯度,也就是是計算影像的一階導數 f'(x,y)求出特定座標處影像灰階值的變化率。由於影像f(x,y)的離散性質,我們可以將上文的梯度計算公式中的變化量Δx和Δy替換為1。這樣一來,我們就能夠計算出影像f(x,y)在不同方向上的一階導數。這種方法使我們能夠捕捉到影像中的強度變化,從而識別出潛在的邊緣區域。
我們計算影像在特定座標點的 x 方向和 y 方向上的強度變化率,將其平方後相加,然後取平方根,以獲得這個向量的大小。這個梯度大小可以告訴我們影像在這個位置的強度變化有多大,從而有助於我們識別出邊緣或其他重要的特徵。第二個公式是對梯度大小的一個近似表示。它通過將x、y的梯度的絕對值相加,然後除以 2 來近似計算梯度的大小,雖然近似公式的精確度較低,但它可以作為一種快速估算的方法,特別是在需要快速處理大量影像數據時。
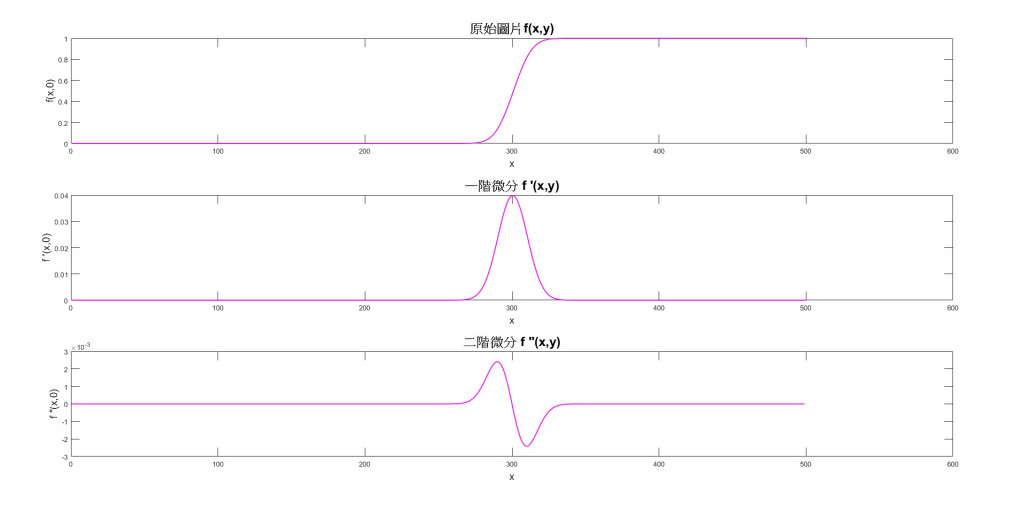
f(x,y)是一張有極大差距的原始灰階圖,f(x,y)是每個x座標對應的灰階值,分別對原始灰階圖進行一次微分和二次微分。
透過這三張圖,我們可以觀察到一些有趣的現象。在一階微分f'(x,y)的圖中,最高點恰好對應著原始影像f(x,y)的邊緣位置。這表示在邊緣位置,影像的強度變化最劇烈。而在二階微分f"(x,y)的圖中,我們可以看到邊緣的存在對應著零點交叉 ( Zero-crossing ) 的情形。所謂零點交叉是指,某個數值變化的區域從正值轉變為負值,這種變化可能是邊緣的一個特徵。