在前一章節中,我們已經深入了解了邊緣檢測的基本原理,特別是與梯度運算和邊緣檢測的關聯性,以及一張圖片的邊緣在數學上的特性。OpenCV 提供了多種方法來實現邊緣檢測,每一種方法都有獨特的特性和適用情境。其中,較為常見的方法包括 Sobel 運算子、Scharr 運算子、Prewitt 運算子、Laplacian運算子,以及更高級的 Canny 邊緣檢測。
這些方法都是從圖片中捕捉出邊緣區域,進而突顯出影像中的物體結構和輪廓。然而,由於不同方法在計算梯度和處理邊緣的方式上存在差異,因此它們在實際應用中可能會有不同的表現,需要根據具體情況選擇最適合的方法。
上一章已經有講解過梯度的計算方式,在上一章中也提到梯度是一個向量,如果我們要得知某個x、y座標梯度的強度,需要使用下列的公式計算強度:

這個公式代表了在特定座標(x, y)處的梯度強度,分別對x和y方向上做偏微分,並將這兩個偏微分結果的平方相加,再取平方根,就能夠得到這個位置的梯度強度。通過對梯度強度的分析,我們可以找到影像中的強烈變化區域,進而識別出物體的邊緣。
然而,對一張512x512圖片的每一個向量元素取出強度是蠻龐大的運算,開根號運算比起加法會花比較多的時間,畢竟開根號涉及更複雜的數學計算。為了節省開根號所耗費的時間,可以使用加法平均來近似開根號的結果,可以使用下列的公式近似:

在進行邊緣檢測的過程中,我們需要使用特定的運算子。透過這些運算子對整張圖片進行摺積運算,我們能夠生成一個新的輪廓圖,這個輪廓圖可以用來突顯並提取影像中的輪廓。這個運算子的大小和內容將直接影響到邊緣檢測的結果。運算子的內容由一組權重構成,這些係數將與影像中相鄰像素的值進行加權總和,產生新的像素值。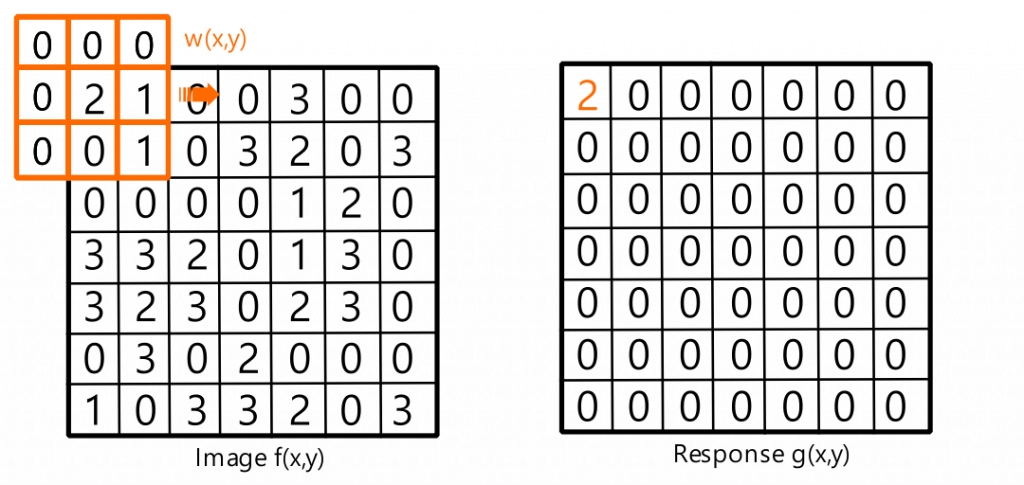
在邊緣檢測中,不同的運算子可以捕捉到不同方向和大小的邊緣特徵。以Sobel核和Prewitt核為例,它們是常見的邊緣檢測運算子,可以在水平和垂直方向上檢測出邊緣。而Laplacian核則更加敏感,能夠捕捉到更微小的變化,包括影像中的角點和紋理特徵。通過選擇適當的運算子,我們能夠有效地提取出不同類型的邊緣特徵,進一步幫助我們理解和分析影像的內容。
下圖是對一張原始圖片f(x,y)使用Sobel垂直運算子Wx(x,y) 進行摺積的過程。在這個過程中,我們可以看到原始圖片f(x,y)的元素與運算子Wx(x,y)進行元素相乘並加總的範例。可以看到原始圖片的垂直元素具有很大差異的灰階值,這會使原始圖片和核相乘加總取絕對值以後得到一個很大的值,這個值越大代表這個區塊是邊緣越有可能是邊緣。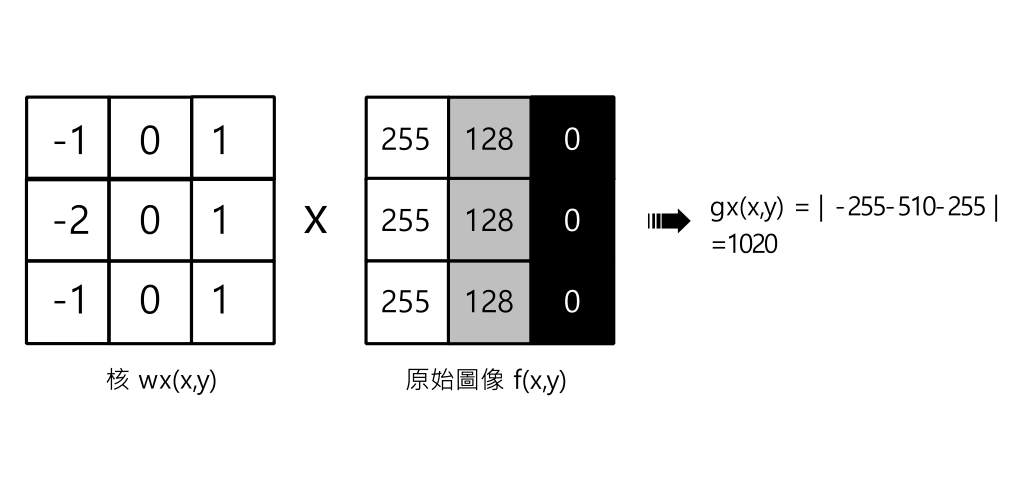
Roberts邊緣檢測是一種簡單的邊緣檢測方法,用於識別影像中的邊緣區域。它使用兩個 2x2 的矩陣(稱為 Roberts 運算子)來計算影像的梯度,進而捕捉出強度變化的區域。Roberts運算子的結構和計算過程如下: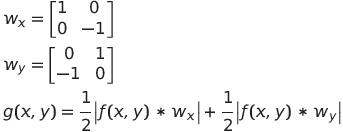
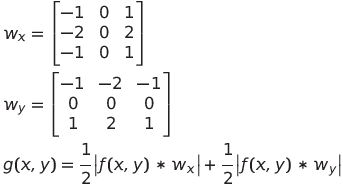
Sobel運算子是一種常用於影像邊緣檢測的過濾器,用於捕捉影像中的強度變化,從而識別出物體的邊緣或輪廓。Sobel運算子通常在影像處理和計算機視覺中使用,它有助於檢測影像中的局部強度變化,從而找到物體的邊界。Sobel運算子可以計算每個像素的水平和垂直方向的梯度(變化率)。這些梯度可以用來識別影像中的亮度變化,進而找到邊緣位置。Sobel運算子的核心權重較簡單,計算複雜度相對較低,但在某些情況下可能對雜訊較敏感。Sobel運算子的結構和計算過程如下:
Scharr運算子是一種用於邊緣檢測的濾波器,它與Sobel運算子類似,但在計算梯度時更加敏感,檢測弱邊緣的能力較強。Scharr運算子的結構和計算過程如下: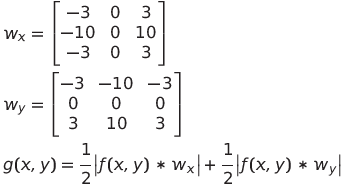
Prewitt是一種邊緣檢測演算法,用於檢測影像中的邊緣特徵。Prewitt具有雜訊抑制的作用,可減少雜訊帶來的誤判。Prewitt運算子的結構和計算過程如下: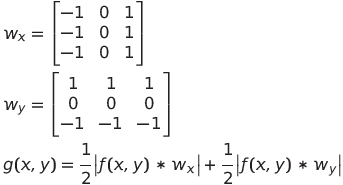
Laplacian(拉普拉斯)是一種在影像處理中廣泛使用的邊緣檢測算法。它不同於Sobel、Scharr、Prewitt等運算子,Laplacian是一種二階導數運算子,它在捕捉影像中的細微變化和邊緣更加敏感。
Laplacian運算子是一個中心值為正數,周圍值為負數或零的矩陣,用於對像素進行加權求和。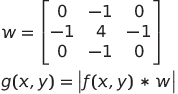
使用OpenCV的filter2D函示進行不同算法(Sobel、Roberts、Scharr、Prewitt、Laplacian)實現邊緣檢測。每個邊緣檢測函數的實現都包括使用filter2D函數進行摺積、轉換像素值到合適的範圍,以及最後的顯示過程。具體步驟如下:
cv::normalize函數用於將影像數值正規化到指定的範圍內。這對於確保影像的亮度值在合適的範圍內。這行程式碼的作用是將scharr_dst影像的像素值經過正規化處理,使得像素值範圍落在0到255之間。這是為了確保影像的對比度和亮度在合適的範圍內,以便更好地顯示和後續處理。
cv::normalize(scharr_dst, scharr_dst,0, 255, cv::NormTypes::NORM_MINMAX);
參數的解釋如下:
src:輸入影像,你希望進行規範化的影像數值。dst:輸出影像,規範化後的結果將被寫入這個影像。0:輸出影像的最小值,這裡設置為0。255:輸出影像的最大值,這裡設置為255,表示將像素值拉伸到0到255的範圍內。cv::NormTypes::NORM_MINMAX:規範化的方式,這裡使用最小最大值範圍規範化,即將影像的最小值映射為0,最大值映射為255。使用OpenCV的cv::addWeighted函數,用於將兩個影像進行加權相加,生成一個新的影像。這在影像處理中常用於合併或混合不同影像的效果。這行程式碼的作用是將兩個使用Scharr算子計算的水平和垂直梯度影像(scharr_dst_x和scharr_dst_y)進行加權相加,生成一個新的影像(scharr_dst)。
cv::addWeighted(scharr_dst_x, 0.5, scharr_dst_y, 0.5, 0, scharr_dst);
scharr_dst_x:第一個輸入影像,將會與第二個影像進行加權相加。0.5:第一個輸入影像的加權因子。這裡將第一個影像的像素值縮放為原來的一半。scharr_dst_y:第二個輸入影像,將會與第一個影像進行加權相加。0.5:第二個輸入影像的加權因子。這裡將第二個影像的像素值縮放為原來的一半。0:Offset值,這將在兩個影像加權相加後被加到最終的結果上。scharr_dst:輸出影像,加權相加後的結果將被寫入這個影像。#include "opencv2/opencv.hpp"
#include "opencv2/core/utils/logger.hpp"
cv::Mat sobel(cv::Mat origin,int threshold);
cv::Mat roberts(cv::Mat origin,int threshold);
cv::Mat scharr(cv::Mat origin,int threshold);
cv::Mat prewitt(cv::Mat origin,int threshold);
cv::Mat laplacian(cv::Mat origin,int threshold);
cv::Mat grayImage;
void onSobel(int threshold, void*);
void onRoberts(int threshold, void*);
void onScharr(int threshold, void*);
void onPrewitt(int threshold, void*);
void onLaplacian(int threshold, void*);
int main()
{
cv::utils::logging::setLogLevel(cv::utils::logging::LOG_LEVEL_ERROR);
grayImage = cv::imread("C:\\Users\\vince\\Downloads\\puzzle.jpg",cv::IMREAD_GRAYSCALE);
cv::namedWindow("Origin", cv::WINDOW_NORMAL);
cv::resizeWindow("Origin", cv::Size(512,512*grayImage.rows/(float)grayImage.cols));
cv::namedWindow("Sobel", cv::WINDOW_NORMAL);
cv::resizeWindow("Sobel", cv::Size(512,512*grayImage.rows/(float)grayImage.cols));
cv::createTrackbar("Threshold","Sobel", NULL, 255, onSobel);
cv::namedWindow("Roberts", cv::WINDOW_NORMAL);
cv::resizeWindow("Roberts", cv::Size(512,512*grayImage.rows/(float)grayImage.cols));
cv::createTrackbar("Threshold","Roberts", NULL, 255,onRoberts);
cv::namedWindow("Scharr", cv::WINDOW_NORMAL);
cv::resizeWindow("Scharr", cv::Size(512,512*grayImage.rows/(float)grayImage.cols));
cv::createTrackbar("Threshold","Scharr", NULL, 255,onScharr);
cv::namedWindow("Prewitt", cv::WINDOW_NORMAL);
cv::resizeWindow("Prewitt", cv::Size(512,512*grayImage.rows/(float)grayImage.cols));
cv::createTrackbar("Threshold","Prewitt", NULL, 255,onPrewitt);
cv::namedWindow("Laplacian", cv::WINDOW_NORMAL);
cv::resizeWindow("Laplacian", cv::Size(512,512*grayImage.rows/(float)grayImage.cols));
cv::createTrackbar("Threshold","Laplacian", NULL, 255,onLaplacian);
cv::imshow("Origin", grayImage);
cv::waitKey(0);
return 0;
}
void onSobel(int threshold, void*) {
cv::Mat dst = sobel(grayImage,threshold);
cv::imshow("Sobel", dst);
}
void onRoberts(int threshold, void*) {
cv::Mat dst = roberts(grayImage,threshold);
cv::imshow("Roberts", dst);
}
void onScharr(int threshold, void*) {
cv::Mat dst = scharr(grayImage,threshold);
cv::imshow("Scharr", dst);
}
void onPrewitt(int threshold, void*) {
cv::Mat dst = prewitt(grayImage,threshold);
cv::imshow("Prewitt", dst);
}
void onLaplacian(int threshold, void*) {
cv::Mat dst = laplacian(grayImage,threshold);
cv::imshow("Laplacian", dst);
}
cv::Mat sobel(cv::Mat origin,int threshold) {
cv::Mat sobel_dst_x;
cv::Mat sobel_dst_y;
cv::Mat sobel_dst;
float kernel_data_x[9] = {-1,0,1,-2,0,2,-1,0,1};
float kernel_data_y[9] = {-1,-2,-1,0,0,0,1,2,1};
cv::Mat kernel_x = cv::Mat(3,3, CV_32F, kernel_data_x);
cv::Mat kernel_y = cv::Mat(3,3, CV_32F,kernel_data_y);
cv::filter2D(origin,sobel_dst_x,CV_32F,kernel_x);
cv::convertScaleAbs(sobel_dst_x,sobel_dst_x);
cv::filter2D(origin,sobel_dst_y,CV_32F,kernel_y);
cv::convertScaleAbs(sobel_dst_y,sobel_dst_y);
cv::addWeighted(sobel_dst_x, 0.5, sobel_dst_y, 0.5, 0, sobel_dst);
cv::normalize(sobel_dst, sobel_dst,0, 255, cv::NormTypes::NORM_MINMAX);
cv::Mat dst;
cv::threshold(sobel_dst, dst, threshold, 255, cv::THRESH_BINARY);
return dst;
}
cv::Mat roberts(cv::Mat origin,int threshold) {
cv::Mat roberts_dst_x;
cv::Mat roberts_dst_y;
cv::Mat roberts_dst;
float kernel_data_x[4] = {1,0,0,-1};
float kernel_data_y[4] = {0,1,-1,0};
cv::Mat kernel_x = cv::Mat(2,2, CV_32F, kernel_data_x);
cv::Mat kernel_y = cv::Mat(2,2, CV_32F,kernel_data_y);
cv::filter2D(origin,roberts_dst_x,CV_32F,kernel_x);
cv::convertScaleAbs(roberts_dst_x,roberts_dst_x);
cv::filter2D(origin,roberts_dst_y,CV_32F,kernel_y);
cv::convertScaleAbs(roberts_dst_y,roberts_dst_y);
cv::addWeighted(roberts_dst_x, 0.5, roberts_dst_y, 0.5, 0, roberts_dst);
cv::normalize(roberts_dst_x, roberts_dst_x,0, 255, cv::NormTypes::NORM_MINMAX);
cv::Mat dst;
cv::threshold(roberts_dst, dst, threshold, 255, cv::THRESH_BINARY);
return dst;
}
cv::Mat scharr(cv::Mat origin,int threshold) {
cv::Mat scharr_dst_x;
cv::Mat scharr_dst_y;
cv::Mat scharr_dst;
float kernel_data_x[9] = {-3,0,3,-10,0,10,-3,0,3};
float kernel_data_y[9] = {-3,-10,-3,0,0,0,3,10,3};
cv::Mat kernel_x = cv::Mat(3,3, CV_32F, kernel_data_x);
cv::Mat kernel_y = cv::Mat(3,3, CV_32F,kernel_data_y);
cv::filter2D(origin,scharr_dst_x,CV_32F,kernel_x);
cv::convertScaleAbs(scharr_dst_x,scharr_dst_x);
cv::filter2D(origin,scharr_dst_y,CV_32F,kernel_y);
cv::convertScaleAbs(scharr_dst_y,scharr_dst_y);
cv::addWeighted(scharr_dst_x, 0.5, scharr_dst_y, 0.5, 0, scharr_dst);
cv::normalize(scharr_dst, scharr_dst,0, 255, cv::NormTypes::NORM_MINMAX);
cv::Mat dst;
cv::threshold(scharr_dst, dst, threshold, 255, cv::THRESH_BINARY);
return dst;
}
cv::Mat prewitt(cv::Mat origin,int threshold) {
cv::Mat prewitt_dst_x;
cv::Mat prewitt_dst_y;
cv::Mat prewitt_dst;
float kernel_data_x[9] = {-1,0,1,-1,0,1,-1,0,1};
float kernel_data_y[9] = {1,1,1,0,0,0,-1,-1,-1};
cv::Mat kernel_x = cv::Mat(3,3, CV_32F, kernel_data_x);
cv::Mat kernel_y = cv::Mat(3,3, CV_32F,kernel_data_y);
cv::filter2D(origin,prewitt_dst_x,CV_32F,kernel_x);
cv::convertScaleAbs(prewitt_dst_x,prewitt_dst_x);
cv::filter2D(origin,prewitt_dst_y,CV_32F,kernel_y);
cv::convertScaleAbs(prewitt_dst_y,prewitt_dst_y);
cv::addWeighted(prewitt_dst_x, 0.5, prewitt_dst_y, 0.5, 0, prewitt_dst);
cv::normalize(prewitt_dst, prewitt_dst,0, 255, cv::NormTypes::NORM_MINMAX);
cv::Mat dst;
cv::threshold(prewitt_dst, dst, threshold, 255, cv::THRESH_BINARY);
return dst;
}
cv::Mat laplacian(cv::Mat origin,int threshold) {
cv::Mat laplacian_dst;
float kernel_data[9] = {0,-1,0,-1,4,-1,0,-1,0};
cv::Mat kernel = cv::Mat(3,3, CV_32F, kernel_data);
cv::filter2D(origin,laplacian_dst,CV_32F,kernel);
cv::convertScaleAbs(laplacian_dst,laplacian_dst);
cv::normalize(laplacian_dst, laplacian_dst,0, 255, cv::NormTypes::NORM_MINMAX);
cv::Mat dst;
cv::threshold(laplacian_dst, dst, threshold, 255, cv::THRESH_BINARY);
return dst;
}
攝影師:Pixabay: https://www.pexels.com/zh-tw/photo/269399/
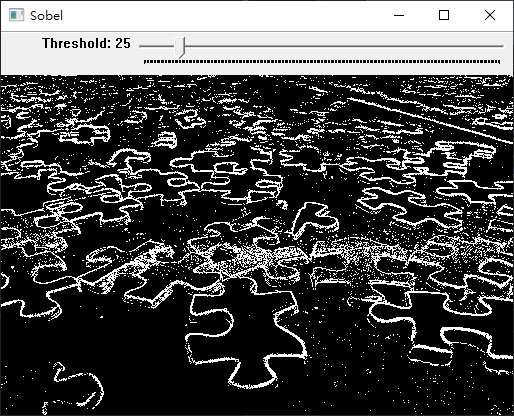
使用Sobel濾波後觀察到邊緣清晰但同時有輕微雜訊的情況。
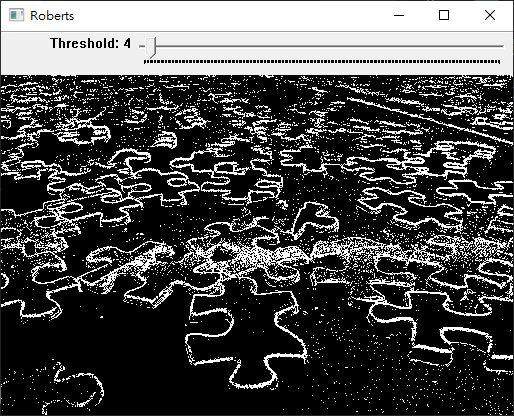
使用Roberts濾波後觀察到相比起Sobel,有較多雜訊的情況。
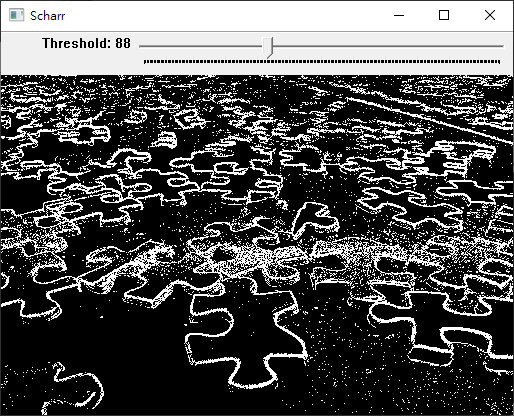
使用Scharr濾波後觀察到,弱邊緣變得更清晰但同時有明顯雜訊的情況,因此需要使用較大的閾值濾除雜訊。
使用Prewitt濾波後觀察到,Prewitt比Sobel濾波有更好的抗雜訊能力。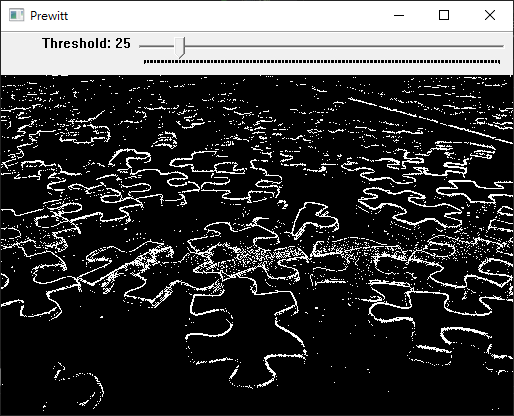
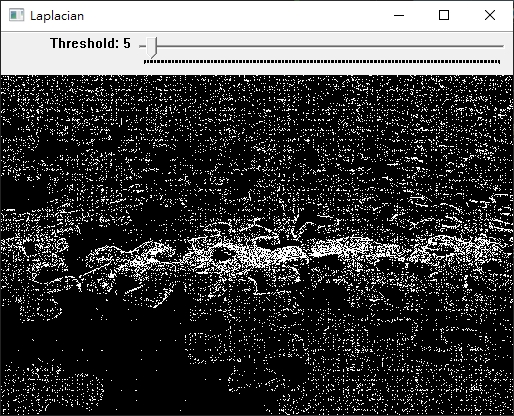
使用Laplacian濾波後觀察到,Laplacian很容易受到雜訊干擾。